 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating Human Intent for Physical Human-Robot Co-Manipulation
May 30, 2017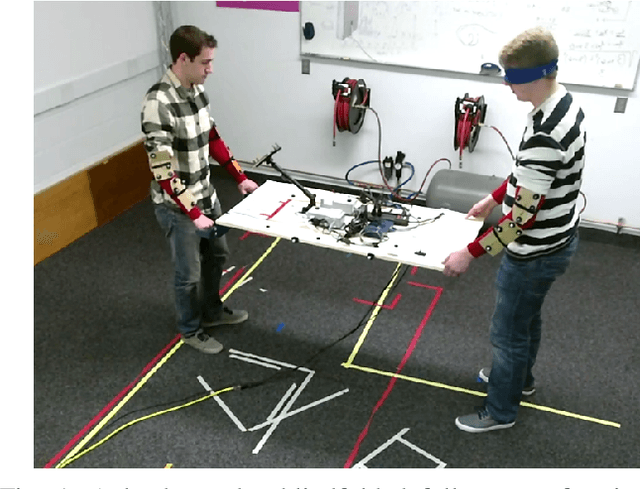
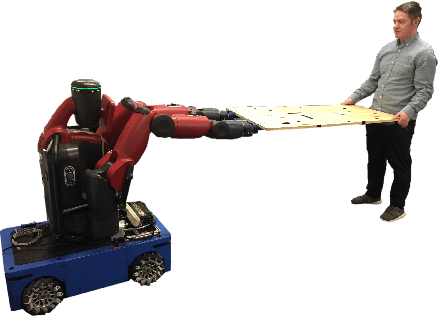
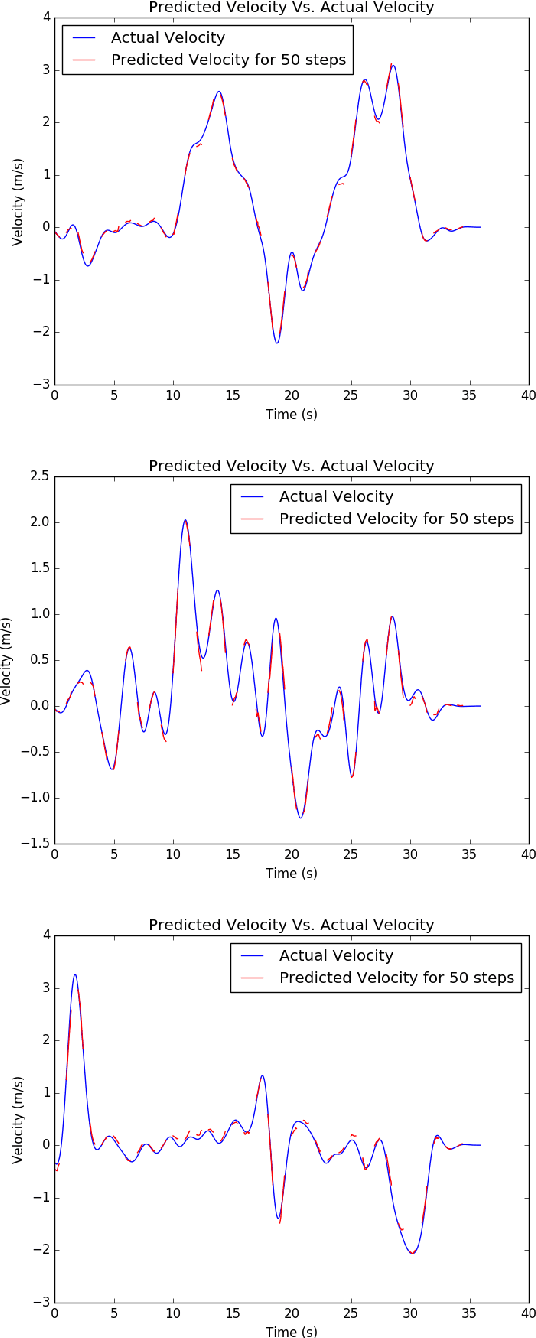
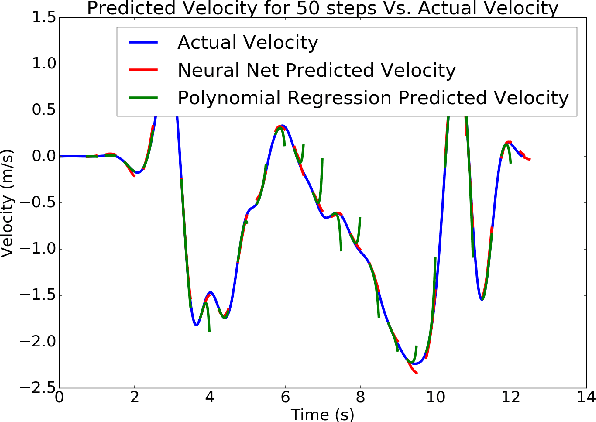
Human teams can be exceptionally efficient at adapting and collaborating during manipulation tasks using shared mental models. However, the same shared mental models that can be used by humans to perform robust low-level force and motion control during collaborative manipulation tasks are non-existent for robots. For robots to perform collaborative tasks with people naturally and efficiently, understanding and predicting human intent is necessary. However, humans are difficult to predict and model. We have completed an exploratory study recording motion and force for 20 human dyads moving an object in tandem in order to better understand how they move and how their movement can be predicted. In this paper, we show how past motion data can be used to predict human intent. In order to predict human intent, which we equate with the human team's velocity for a short time horizon, we used a neural network. Using the previous 150 time steps at a rate of 200 Hz, human intent can be predicted for the next 50 time steps with a mean squared error of 0.02 (m/s)^2. We also show that human intent can be estimated in a human-robot dyad. This work is an important first step in enabling future work of integrating human intent estimation on a robot controller to execute a short-term collaborative trajectory.
Analysis of Rigid Extended Object Co-Manipulation by Human Dyads: Lateral Movement Characterization
Feb 02, 2017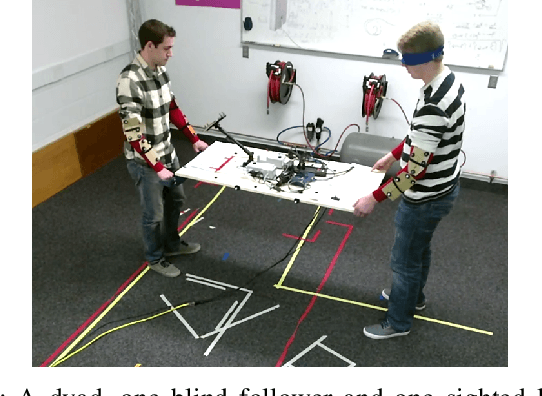
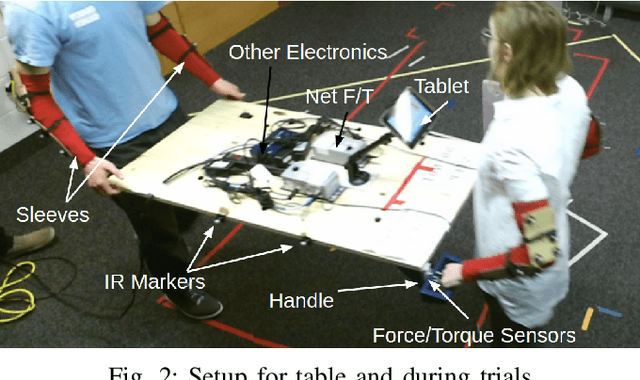
During co-manipulation involving humans and robots, it is necessary to base robot controllers on human behaviors to achieve comfortable and coordinated movement between the human-robot dyad. In this paper, we describe an experiment between human-human dyads and we record the force and motion data as the leader-follower dyads moved in translation and rotation. The force/motion data was then analyzed for patterns found during lateral translation only. For extended objects, lateral translation and in-place rotation are ambiguous, but this paper determines a way to characterize lateral translation triggers for future use in human-robot interaction. The study has 4 main results. First, interaction forces are apparent and necessary for co-manipulation. Second, minimum-jerk trajectories are found in the lateral direction only for lateral movement. Third, the beginning of a lateral movement is characterized by distinct force triggers by the leader. Last, there are different metrics that can be attributed to determine which dyads moved most effectively in the lateral direction.