 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking Image Similarity Metrics for Novel View Synthesis Applications
Jun 14, 2025


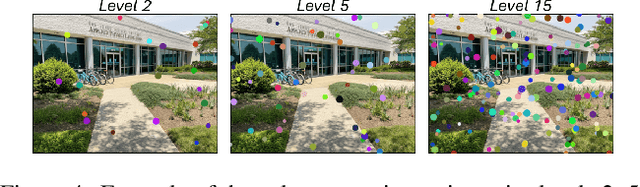
Traditional image similarity metrics are ineffective at evaluating the similarity between a real image of a scene and an artificially generated version of that viewpoint [6, 9, 13, 14]. Our research evaluates the effectiveness of a new, perceptual-based similarity metric, DreamSim [2], and three popular image similarity metrics: Structural Similarity (SSIM), Peak Signal-to-Noise Ratio (PSNR), and Learned Perceptual Image Patch Similarity (LPIPS) [18, 19] in novel view synthesis (NVS) applications. We create a corpus of artificially corrupted images to quantify the sensitivity and discriminative power of each of the image similarity metrics. These tests reveal that traditional metrics are unable to effectively differentiate between images with minor pixel-level changes and those with substantial corruption, whereas DreamSim is more robust to minor defects and can effectively evaluate the high-level similarity of the image. Additionally, our results demonstrate that DreamSim provides a more effective and useful evaluation of render quality, especially for evaluating NVS renders in real-world use cases where slight rendering corruptions are common, but do not affect image utility for human tasks.
View Planning and Navigation Algorithms for Autonomous Bridge Inspection with UAVs
Oct 03, 2019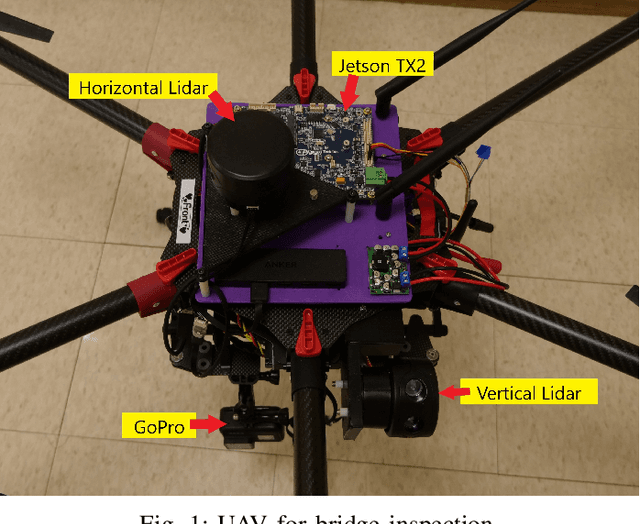
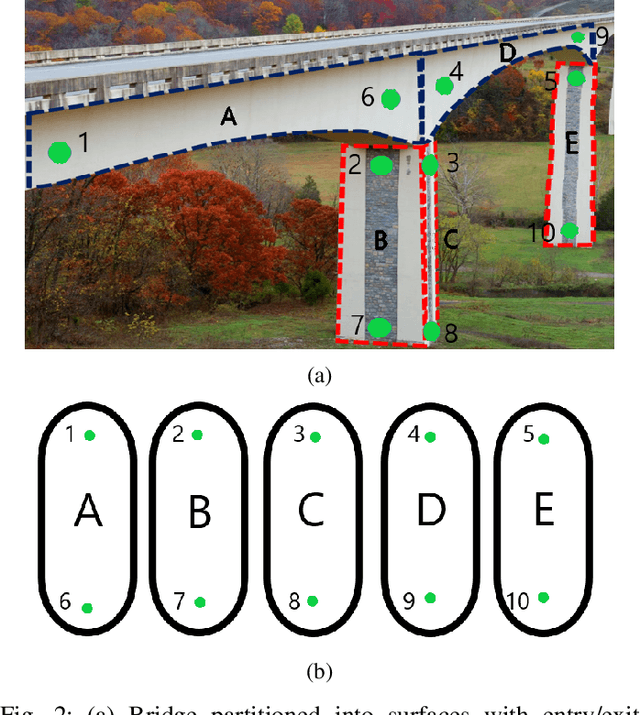
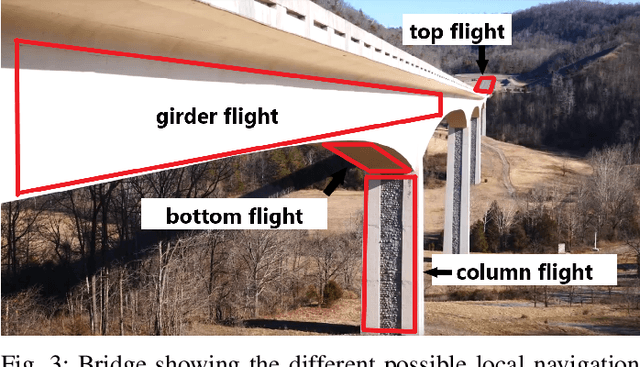
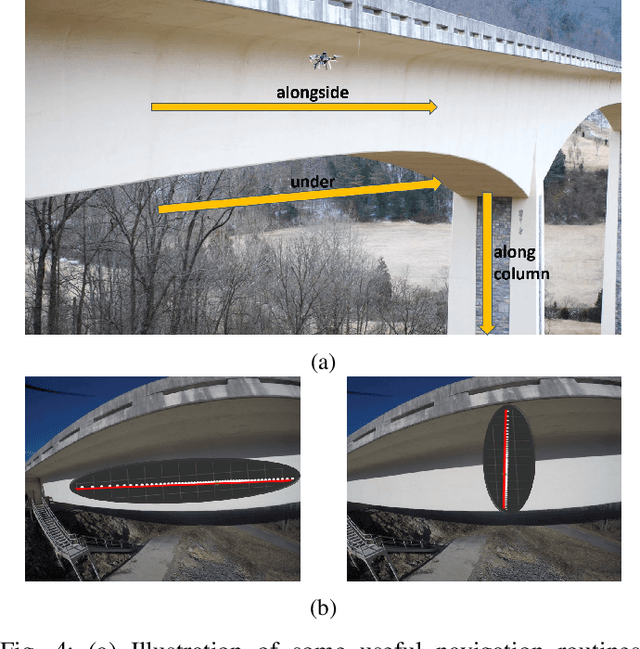
We study the problem of infrastructure inspection using an Unmanned Aerial Vehicle (UAV) in box girder bridge environments. We consider a scenario where the UAV needs to fully inspect box girder bridges and localize along the bridge surface when standard methods like GPS and optical flow are denied. Our method for overcoming the difficulties of box girder bridges consist of creating local navigation routines, a supervisor, and a planner. The local navigation routines use two 2D Lidars for girder and column flight. For switching between local navigation routines we implement a supervisor which dictates when the UAV is able to switch between local navigation routines. Lastly, we implement a planner to calculate the path along that box girder bridge that will minimize the flight time of the UAV. With local navigation routines, a supervisor, and a planner we construct a system that can fully and autonomously inspect box girder bridges when standard methods are unavailable.