 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeView Planning and Navigation Algorithms for Autonomous Bridge Inspection with UAVs
Paper and Code
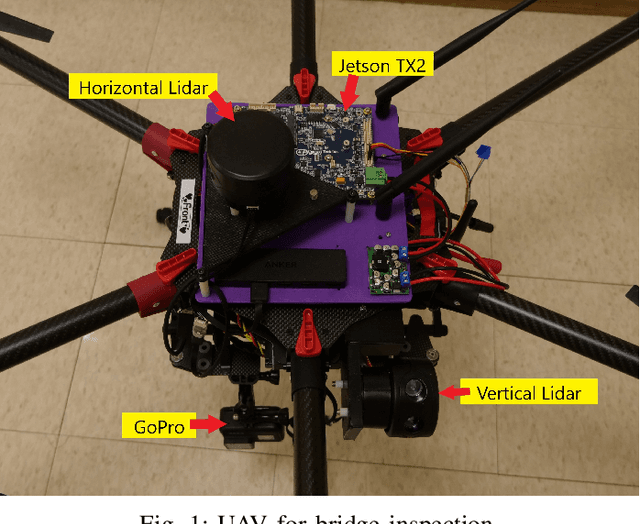
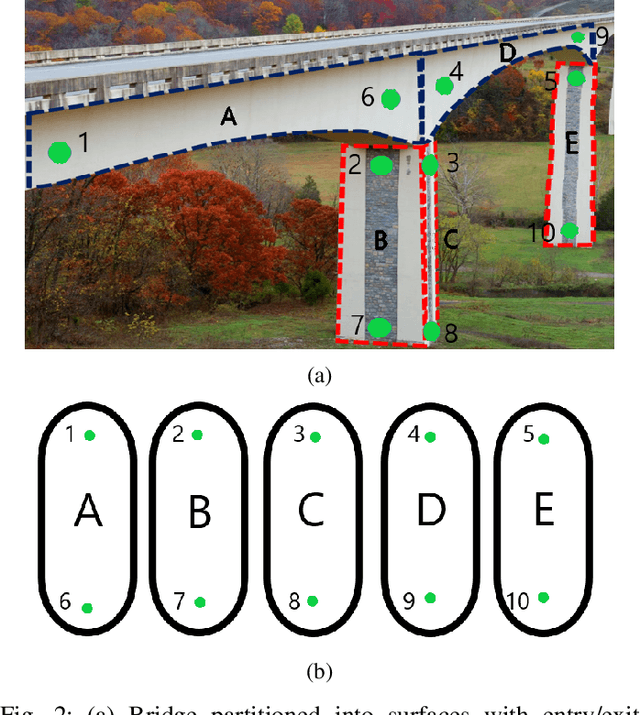
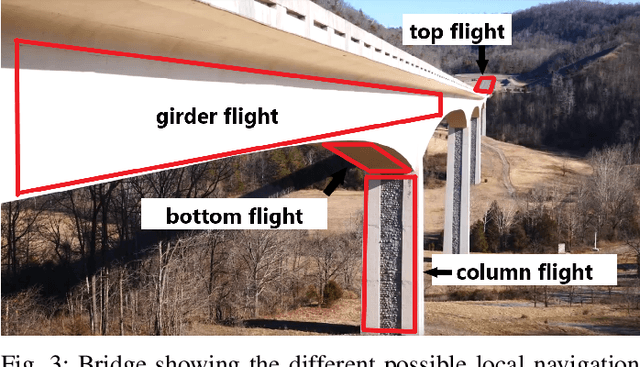
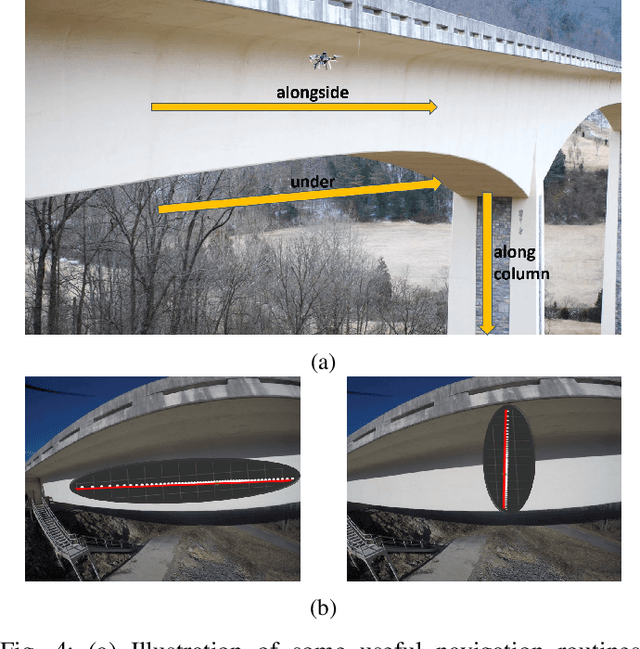
We study the problem of infrastructure inspection using an Unmanned Aerial Vehicle (UAV) in box girder bridge environments. We consider a scenario where the UAV needs to fully inspect box girder bridges and localize along the bridge surface when standard methods like GPS and optical flow are denied. Our method for overcoming the difficulties of box girder bridges consist of creating local navigation routines, a supervisor, and a planner. The local navigation routines use two 2D Lidars for girder and column flight. For switching between local navigation routines we implement a supervisor which dictates when the UAV is able to switch between local navigation routines. Lastly, we implement a planner to calculate the path along that box girder bridge that will minimize the flight time of the UAV. With local navigation routines, a supervisor, and a planner we construct a system that can fully and autonomously inspect box girder bridges when standard methods are unavailable.