 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFront2Back: Single View 3D Shape Reconstruction via Front to Back Prediction
Jan 31, 2020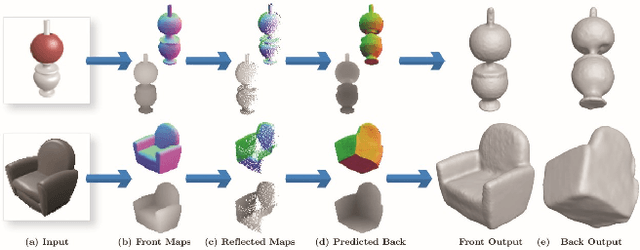


Reconstruction of a 3D shape from a single 2D image is a classical computer vision problem, whose difficulty stems from the inherent ambiguity of recovering occluded or only partially observed surfaces. Recent methods address this challenge through the use of largely unstructured neural networks that effectively distill conditional mapping and priors over 3D shape. In this work, we induce structure and geometric constraints by leveraging three core observations: (1) the surface of most everyday objects is often almost entirely exposed from pairs of typical opposite views; (2) everyday objects often exhibit global reflective symmetries which can be accurately predicted from single views; (3) opposite orthographic views of a 3D shape share consistent silhouettes. Following these observations, we first predict orthographic 2.5D visible surface maps (depth, normal and silhouette) from perspective 2D images, and detect global reflective symmetries in this data; second, we predict the back facing depth and normal maps using as input the front maps and, when available, the symmetric reflections of these maps; and finally, we reconstruct a 3D mesh from the union of these maps using a surface reconstruction method best suited for this data. Our experiments demonstrate that our framework outperforms state-of-the art approaches for 3D shape reconstructions from 2D and 2.5D data in terms of input fidelity and details preservation. Specifically, we achieve 12% better performance on average in ShapeNet benchmark dataset, and up to 19% for certain classes of objects (e.g., chairs and vessels).