 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Pedestrian Risks in Shared Spaces Through Autonomous Vehicle Experiments on a Fixed Track
Apr 11, 2025
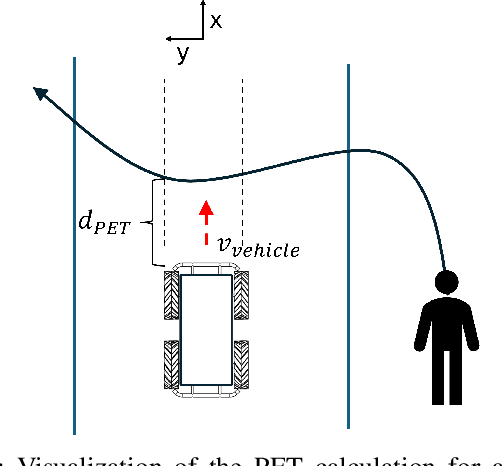
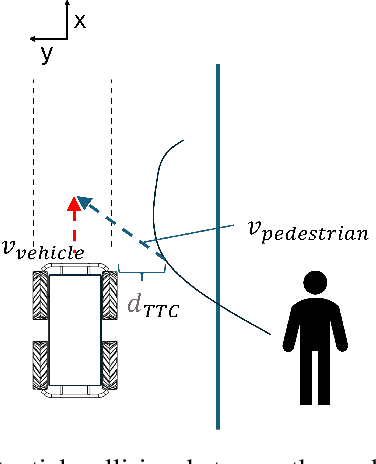
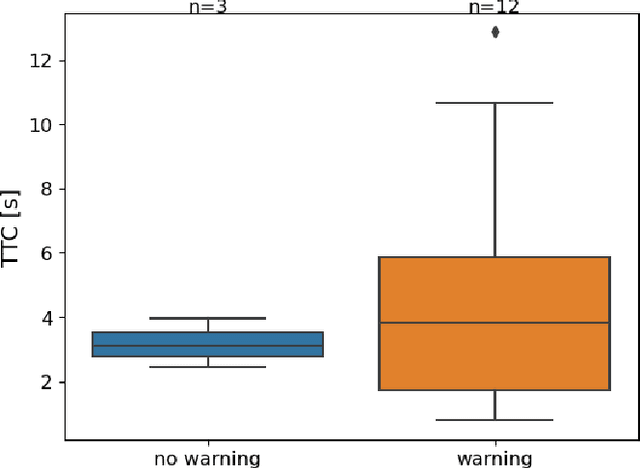
The majority of research on safety in autonomous vehicles has been conducted in structured and controlled environments. However, there is a scarcity of research on safety in unregulated pedestrian areas, especially when interacting with public transport vehicles like trams. This study investigates pedestrian responses to an alert system in this context by replicating this real-world scenario in an environment using an autonomous vehicle. The results show that safety measures from other contexts can be adapted to shared spaces with trams, where fixed tracks heighten risks in unregulated crossings.
Want a Ride? Attitudes Towards Autonomous Driving and Behavior in Autonomous Vehicles
Sep 04, 2024



Research conducted previously has focused on either attitudes toward or behaviors associated with autonomous driving. In this paper, we bridge these two dimensions by exploring how attitudes towards autonomous driving influence behavior in an autonomous car. We conducted a field experiment with twelve participants engaged in non-driving related tasks. Our findings indicate that attitudes towards autonomous driving do not affect participants' driving interventions in vehicle control and eye glance behavior. Therefore, studies on autonomous driving technology lacking field tests might be unreliable for assessing the potential behaviors, attitudes, and acceptance of autonomous vehicles.
Integrating Naturalistic Insights in Objective Multi-Vehicle Safety Framework
Aug 19, 2024



As autonomous vehicle technology advances, the precise assessment of safety in complex traffic scenarios becomes crucial, especially in mixed-vehicle environments where human perception of safety must be taken into account. This paper presents a framework designed for assessing traffic safety in multi-vehicle situations, facilitating the simultaneous utilization of diverse objective safety metrics. Additionally, it allows the integration of subjective perception of safety by adjusting model parameters. The framework was applied to evaluate various model configurations in car-following scenarios on a highway, utilizing naturalistic driving datasets. The evaluation of the model showed an outstanding performance, particularly when integrating multiple objective safety measures. Furthermore, the performance was significantly enhanced when considering all surrounding vehicles.
Method for Comparison of Surrogate Safety Measures in Multi-Vehicle Scenarios
Apr 18, 2023With the race towards higher levels of automation in vehicles, it is imperative to guarantee the safety of all involved traffic participants. Yet, while high-risk traffic situations between two vehicles are well understood, traffic situations involving more vehicles lack the tools to be properly analyzed. This paper proposes a method to compare Surrogate Safety Measures values in highway multi-vehicle traffic situations such as lane-changes that involve three vehicles. This method allows for a comprehensive statistical analysis and highlights how the safety distance between vehicles is shifted in favor of the traffic conflict between the leading vehicle and the lane-changing vehicle.
Implementation of Road Safety Perception in Autonomous Vehicles in a Lane Change Scenario
Nov 02, 2022Understanding human driving behavior is crucial to develop autonomous vehicles' algorithms. However, most low level automation, such as the one in advanced driving assistance systems (ADAS), is based on objective safety measures, which are not always aligned with what the drivers perceive as safe and their correspondent driving behavior. Finding the bridge between the subjective perception and objective safety measures has been analyzed in this paper focusing specifically on lane-change scenarios. Results showed statistically significant differences between what is perceived as safe by drivers and objective metrics depending on the specific maneuver and location of drivers.