Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Pedestrian Risks in Shared Spaces Through Autonomous Vehicle Experiments on a Fixed Track
Paper and Code
Apr 11, 2025
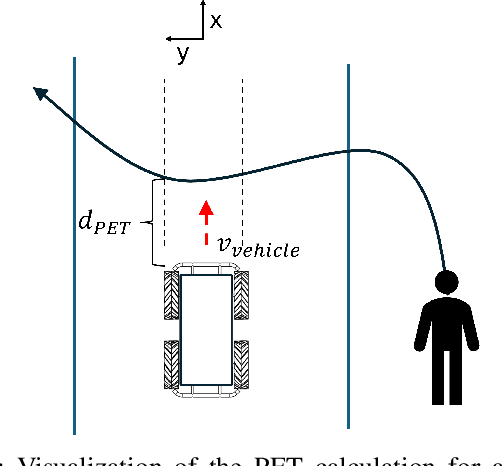
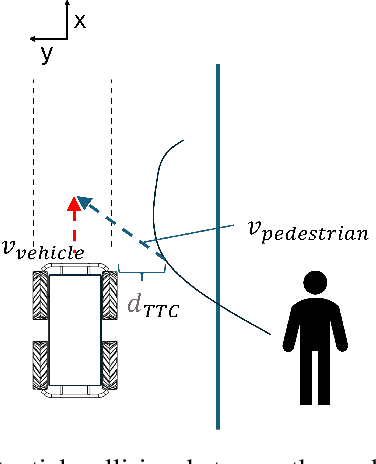
The majority of research on safety in autonomous vehicles has been conducted in structured and controlled environments. However, there is a scarcity of research on safety in unregulated pedestrian areas, especially when interacting with public transport vehicles like trams. This study investigates pedestrian responses to an alert system in this context by replicating this real-world scenario in an environment using an autonomous vehicle. The results show that safety measures from other contexts can be adapted to shared spaces with trams, where fixed tracks heighten risks in unregulated crossings.
View paper on