 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFAST: Similarity-based Knowledge Transfer for Efficient Policy Learning
Jul 27, 2025Transfer Learning (TL) offers the potential to accelerate learning by transferring knowledge across tasks. However, it faces critical challenges such as negative transfer, domain adaptation and inefficiency in selecting solid source policies. These issues often represent critical problems in evolving domains, i.e. game development, where scenarios transform and agents must adapt. The continuous release of new agents is costly and inefficient. In this work we challenge the key issues in TL to improve knowledge transfer, agents performance across tasks and reduce computational costs. The proposed methodology, called FAST - Framework for Adaptive Similarity-based Transfer, leverages visual frames and textual descriptions to create a latent representation of tasks dynamics, that is exploited to estimate similarity between environments. The similarity scores guides our method in choosing candidate policies from which transfer abilities to simplify learning of novel tasks. Experimental results, over multiple racing tracks, demonstrate that FAST achieves competitive final performance compared to learning-from-scratch methods while requiring significantly less training steps. These findings highlight the potential of embedding-driven task similarity estimations.
Combining Pre-Trained Models for Enhanced Feature Representation in Reinforcement Learning
Jul 09, 2025The recent focus and release of pre-trained models have been a key components to several advancements in many fields (e.g. Natural Language Processing and Computer Vision), as a matter of fact, pre-trained models learn disparate latent embeddings sharing insightful representations. On the other hand, Reinforcement Learning (RL) focuses on maximizing the cumulative reward obtained via agent's interaction with the environment. RL agents do not have any prior knowledge about the world, and they either learn from scratch an end-to-end mapping between the observation and action spaces or, in more recent works, are paired with monolithic and computationally expensive Foundational Models. How to effectively combine and leverage the hidden information of different pre-trained models simultaneously in RL is still an open and understudied question. In this work, we propose Weight Sharing Attention (WSA), a new architecture to combine embeddings of multiple pre-trained models to shape an enriched state representation, balancing the tradeoff between efficiency and performance. We run an extensive comparison between several combination modes showing that WSA obtains comparable performance on multiple Atari games compared to end-to-end models. Furthermore, we study the generalization capabilities of this approach and analyze how scaling the number of models influences agents' performance during and after training.
I Know How: Combining Prior Policies to Solve New Tasks
Jun 14, 2024Multi-Task Reinforcement Learning aims at developing agents that are able to continually evolve and adapt to new scenarios. However, this goal is challenging to achieve due to the phenomenon of catastrophic forgetting and the high demand of computational resources. Learning from scratch for each new task is not a viable or sustainable option, and thus agents should be able to collect and exploit prior knowledge while facing new problems. While several methodologies have attempted to address the problem from different perspectives, they lack a common structure. In this work, we propose a new framework, I Know How (IKH), which provides a common formalization. Our methodology focuses on modularity and compositionality of knowledge in order to achieve and enhance agent's ability to learn and adapt efficiently to dynamic environments. To support our framework definition, we present a simple application of it in a simulated driving environment and compare its performance with that of state-of-the-art approaches.
Calibration of Continual Learning Models
Apr 12, 2024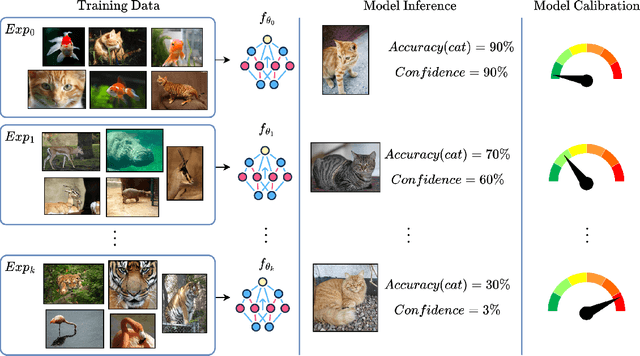
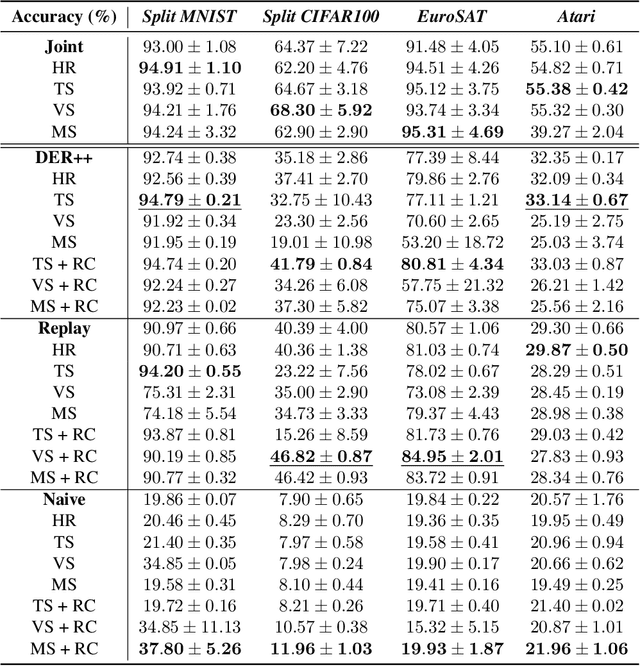
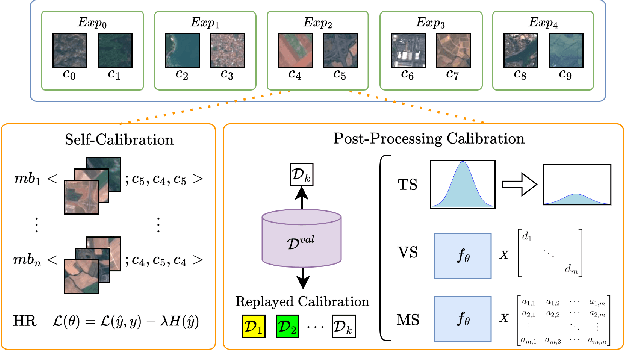
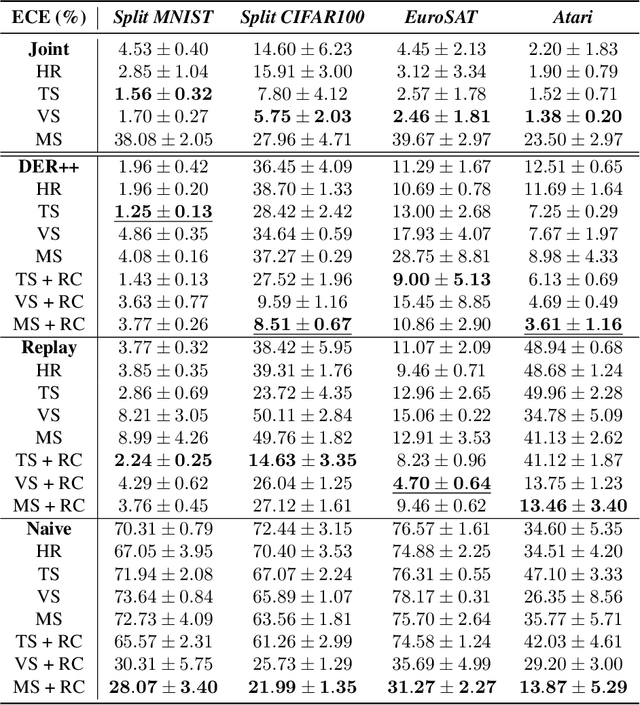
Continual Learning (CL) focuses on maximizing the predictive performance of a model across a non-stationary stream of data. Unfortunately, CL models tend to forget previous knowledge, thus often underperforming when compared with an offline model trained jointly on the entire data stream. Given that any CL model will eventually make mistakes, it is of crucial importance to build calibrated CL models: models that can reliably tell their confidence when making a prediction. Model calibration is an active research topic in machine learning, yet to be properly investigated in CL. We provide the first empirical study of the behavior of calibration approaches in CL, showing that CL strategies do not inherently learn calibrated models. To mitigate this issue, we design a continual calibration approach that improves the performance of post-processing calibration methods over a wide range of different benchmarks and CL strategies. CL does not necessarily need perfect predictive models, but rather it can benefit from reliable predictive models. We believe our study on continual calibration represents a first step towards this direction.