 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometry-First Generative Spatial Single-Cell Reconstruction
May 27, 2026Single-cell RNA sequencing (scRNA-seq) profiles large numbers of cells but loses spatial context, whereas spatial transcriptomics (ST) preserves partial spatial structure at lower resolution. Most existing integration methods either deconvolve spot mixtures or map cells onto a measured spot lattice, which ties reconstructions to a fixed grid and slide-specific coordinate systems, a limitation that is especially problematic in unpaired settings. We propose GEARS, a geometry-first framework that reconstructs an intrinsic single-cell spatial geometry guided by ST, without relying on cell-type labels, histological images, or cell-to-spot assignment. GEARS first learns a domain-invariant expression encoder that aligns ST spots and dissociated cells, and then trains a permutation-equivariant generator with a diffusion-based refiner with EDM-style preconditioning to generate local spatial geometries under pose-invariant supervision derived from ST coordinates. At inference, GEARS reconstructs geometry on many overlapping subsets of scRNA-seq cells, aggregates predicted pairwise distances across subsets, and solves a global distance-geometry problem to obtain canonical two-dimensional coordinates and a dense distance matrix. Extensive quantitative and qualitative experiments, including cross-section generalization, show that GEARS consistently improves global distance preservation, local neighborhood fidelity, and spatial distribution alignment compared to strong spatial mapping and deconvolution baselines.
Biological Pathway Guided Gene Selection Through Collaborative Reinforcement Learning
May 30, 2025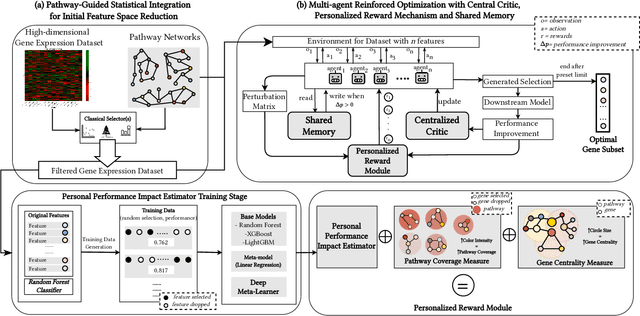
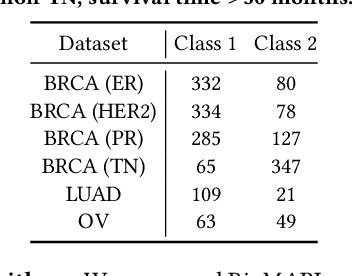
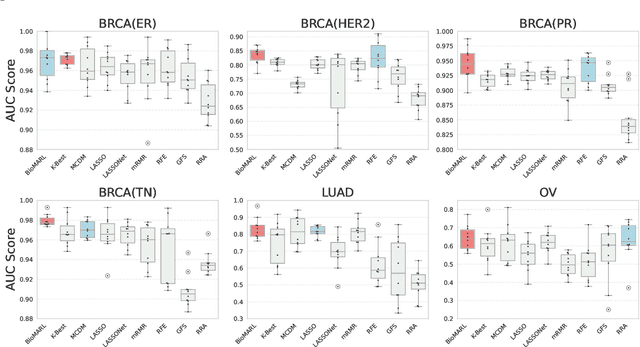

Gene selection in high-dimensional genomic data is essential for understanding disease mechanisms and improving therapeutic outcomes. Traditional feature selection methods effectively identify predictive genes but often ignore complex biological pathways and regulatory networks, leading to unstable and biologically irrelevant signatures. Prior approaches, such as Lasso-based methods and statistical filtering, either focus solely on individual gene-outcome associations or fail to capture pathway-level interactions, presenting a key challenge: how to integrate biological pathway knowledge while maintaining statistical rigor in gene selection? To address this gap, we propose a novel two-stage framework that integrates statistical selection with biological pathway knowledge using multi-agent reinforcement learning (MARL). First, we introduce a pathway-guided pre-filtering strategy that leverages multiple statistical methods alongside KEGG pathway information for initial dimensionality reduction. Next, for refined selection, we model genes as collaborative agents in a MARL framework, where each agent optimizes both predictive power and biological relevance. Our framework incorporates pathway knowledge through Graph Neural Network-based state representations, a reward mechanism combining prediction performance with gene centrality and pathway coverage, and collaborative learning strategies using shared memory and a centralized critic component. Extensive experiments on multiple gene expression datasets demonstrate that our approach significantly improves both prediction accuracy and biological interpretability compared to traditional methods.
Feature Cognition Enhancement via Interaction-Aware Automated Transformation
Sep 29, 2023



Creating an effective representation space is crucial for mitigating the curse of dimensionality, enhancing model generalization, addressing data sparsity, and leveraging classical models more effectively. Recent advancements in automated feature engineering (AutoFE) have made significant progress in addressing various challenges associated with representation learning, issues such as heavy reliance on intensive labor and empirical experiences, lack of explainable explicitness, and inflexible feature space reconstruction embedded into downstream tasks. However, these approaches are constrained by: 1) generation of potentially unintelligible and illogical reconstructed feature spaces, stemming from the neglect of expert-level cognitive processes; 2) lack of systematic exploration, which subsequently results in slower model convergence for identification of optimal feature space. To address these, we introduce an interaction-aware reinforced generation perspective. We redefine feature space reconstruction as a nested process of creating meaningful features and controlling feature set size through selection. We develop a hierarchical reinforcement learning structure with cascading Markov Decision Processes to automate feature and operation selection, as well as feature crossing. By incorporating statistical measures, we reward agents based on the interaction strength between selected features, resulting in intelligent and efficient exploration of the feature space that emulates human decision-making. Extensive experiments are conducted to validate our proposed approach.
Deep Graph Stream SVDD: Anomaly Detection in Cyber-Physical Systems
Feb 24, 2023Our work focuses on anomaly detection in cyber-physical systems. Prior literature has three limitations: (1) Failing to capture long-delayed patterns in system anomalies; (2) Ignoring dynamic changes in sensor connections; (3) The curse of high-dimensional data samples. These limit the detection performance and usefulness of existing works. To address them, we propose a new approach called deep graph stream support vector data description (SVDD) for anomaly detection. Specifically, we first use a transformer to preserve both short and long temporal patterns of monitoring data in temporal embeddings. Then we cluster these embeddings according to sensor type and utilize them to estimate the change in connectivity between various sensors to construct a new weighted graph. The temporal embeddings are mapped to the new graph as node attributes to form weighted attributed graph. We input the graph into a variational graph auto-encoder model to learn final spatio-temporal representation. Finally, we learn a hypersphere that encompasses normal embeddings and predict the system status by calculating the distances between the hypersphere and data samples. Extensive experiments validate the superiority of our model, which improves F1-score by 35.87%, AUC by 19.32%, while being 32 times faster than the best baseline at training and inference.