 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigation of Warrior Robots Behavior by Using Evolutionary Algorithms
Nov 18, 2020



In this study, we review robots behavior especially warrior robots by using evolutionary algorithms. This kind of algorithms is inspired by nature that causes robots behaviors get resemble to collective behavior. Collective behavior of creatures such as bees was shown that do some functions which depended on interaction and cooperation would need to a well-organized system so that all creatures within it carry out their duty, very well. For robots which do not have any intelligence, we can define an algorithm and show the results by a simple simulation.
Orientation-boosted Voxel Nets for 3D Object Recognition
Oct 19, 2017

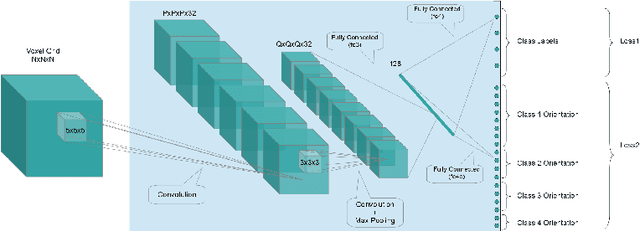

Recent work has shown good recognition results in 3D object recognition using 3D convolutional networks. In this paper, we show that the object orientation plays an important role in 3D recognition. More specifically, we argue that objects induce different features in the network under rotation. Thus, we approach the category-level classification task as a multi-task problem, in which the network is trained to predict the pose of the object in addition to the class label as a parallel task. We show that this yields significant improvements in the classification results. We test our suggested architecture on several datasets representing various 3D data sources: LiDAR data, CAD models, and RGB-D images. We report state-of-the-art results on classification as well as significant improvements in precision and speed over the baseline on 3D detection.