 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeuTRAND: Unsupervised Anomaly Detection in Traffic Trajectories
Apr 19, 2024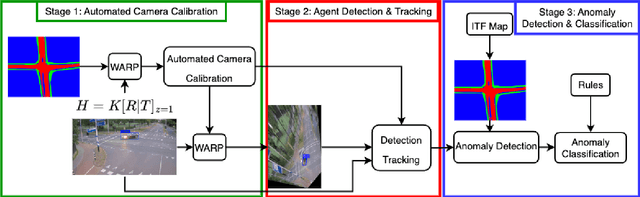
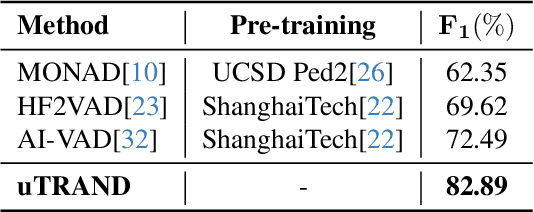
Deep learning-based approaches have achieved significant improvements on public video anomaly datasets, but often do not perform well in real-world applications. This paper addresses two issues: the lack of labeled data and the difficulty of explaining the predictions of a neural network. To this end, we present a framework called uTRAND, that shifts the problem of anomalous trajectory prediction from the pixel space to a semantic-topological domain. The framework detects and tracks all types of traffic agents in bird's-eye-view videos of traffic cameras mounted at an intersection. By conceptualizing the intersection as a patch-based graph, it is shown that the framework learns and models the normal behaviour of traffic agents without costly manual labeling. Furthermore, uTRAND allows to formulate simple rules to classify anomalous trajectories in a way suited for human interpretation. We show that uTRAND outperforms other state-of-the-art approaches on a dataset of anomalous trajectories collected in a real-world setting, while producing explainable detection results.
Homography Estimation in Complex Topological Scenes
Aug 02, 2023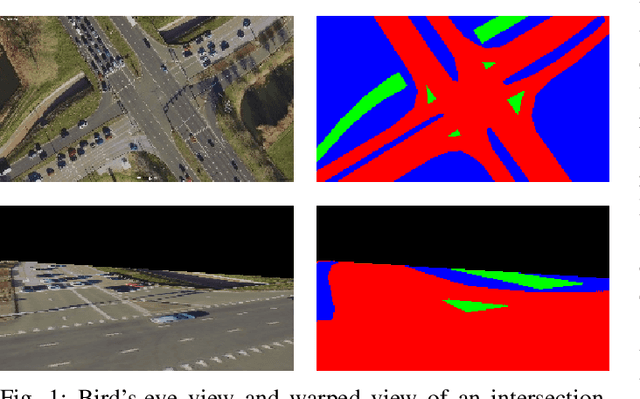
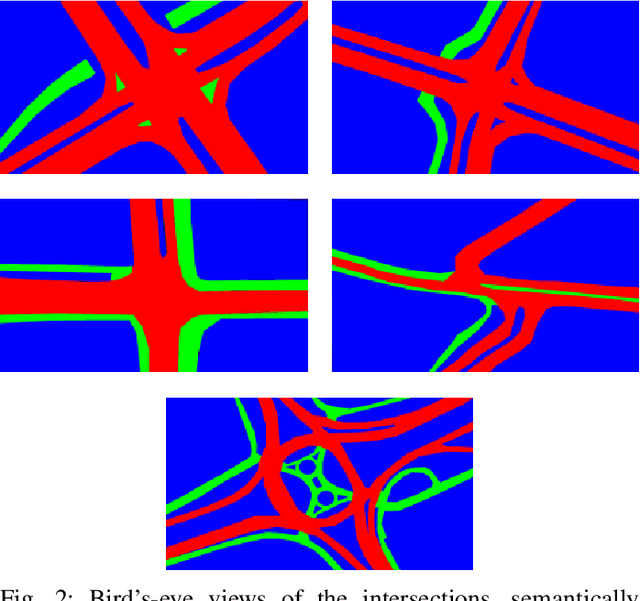
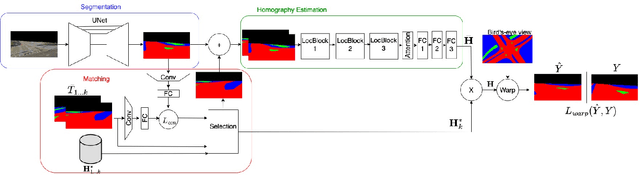
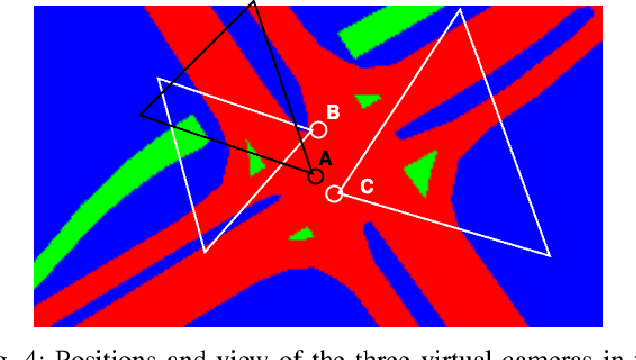
Surveillance videos and images are used for a broad set of applications, ranging from traffic analysis to crime detection. Extrinsic camera calibration data is important for most analysis applications. However, security cameras are susceptible to environmental conditions and small camera movements, resulting in a need for an automated re-calibration method that can account for these varying conditions. In this paper, we present an automated camera-calibration process leveraging a dictionary-based approach that does not require prior knowledge on any camera settings. The method consists of a custom implementation of a Spatial Transformer Network (STN) and a novel topological loss function. Experiments reveal that the proposed method improves the IoU metric by up to 12% w.r.t. a state-of-the-art model across five synthetic datasets and the World Cup 2014 dataset.