 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeField geology with a wearable computer: 1st results of the Cyborg Astrobiologist System
Jun 24, 2005
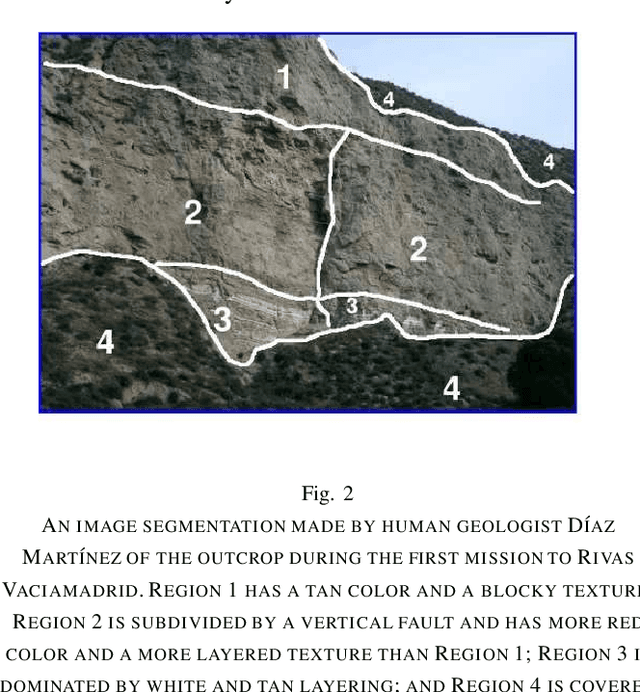
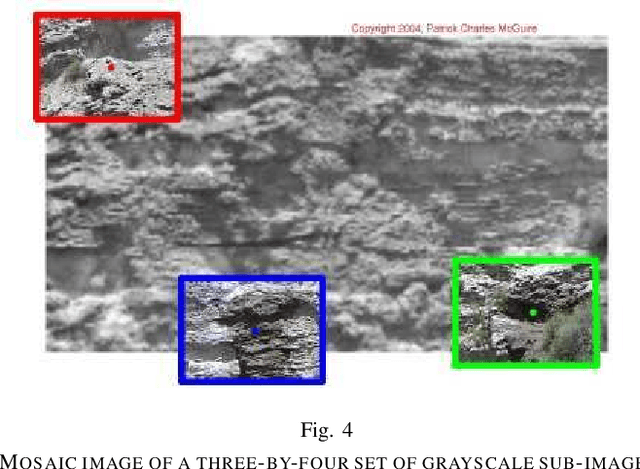
We present results from the first geological field tests of the `Cyborg Astrobiologist', which is a wearable computer and video camcorder system that we are using to test and train a computer-vision system towards having some of the autonomous decision-making capabilities of a field-geologist. The Cyborg Astrobiologist platform has thus far been used for testing and development of these algorithms and systems: robotic acquisition of quasi-mosaics of images, real-time image segmentation, and real-time determination of interesting points in the image mosaics. This work is more of a test of the whole system, rather than of any one part of the system. However, beyond the concept of the system itself, the uncommon map (despite its simplicity) is the main innovative part of the system. The uncommon map helps to determine interest-points in a context-free manner. Overall, the hardware and software systems function reliably, and the computer-vision algorithms are adequate for the first field tests. In addition to the proof-of-concept aspect of these field tests, the main result of these field tests is the enumeration of those issues that we can improve in the future, including: dealing with structural shadow and microtexture, and also, controlling the camera's zoom lens in an intelligent manner. Nonetheless, despite these and other technical inadequacies, this Cyborg Astrobiologist system, consisting of a camera-equipped wearable-computer and its computer-vision algorithms, has demonstrated its ability of finding genuinely interesting points in real-time in the geological scenery, and then gathering more information about these interest points in an automated manner. We use these capabilities for autonomous guidance towards geological points-of-interest.
* accepted by ICINCO 2005, 2nd International Conference on Informatics in Control, Automation and Robotics, 14-17 September 2005, Barcelona, Spain. 9 pages, 7 figures
The Cyborg Astrobiologist: Scouting Red Beds for Uncommon Features with Geological Significance
May 23, 2005

The `Cyborg Astrobiologist' (CA) has undergone a second geological field trial, at a red sandstone site in northern Guadalajara, Spain, near Riba de Santiuste. The Cyborg Astrobiologist is a wearable computer and video camera system that has demonstrated a capability to find uncommon interest points in geological imagery in real-time in the field. The first (of three) geological structures that we studied was an outcrop of nearly homogeneous sandstone, which exhibits oxidized-iron impurities in red and and an absence of these iron impurities in white. The white areas in these ``red beds'' have turned white because the iron has been removed by chemical reduction, perhaps by a biological agent. The computer vision system found in one instance several (iron-free) white spots to be uncommon and therefore interesting, as well as several small and dark nodules. The second geological structure contained white, textured mineral deposits on the surface of the sandstone, which were found by the CA to be interesting. The third geological structure was a 50 cm thick paleosol layer, with fossilized root structures of some plants, which were found by the CA to be interesting. A quasi-blind comparison of the Cyborg Astrobiologist's interest points for these images with the interest points determined afterwards by a human geologist shows that the Cyborg Astrobiologist concurred with the human geologist 68% of the time (true positive rate), with a 32% false positive rate and a 32% false negative rate. (abstract has been abridged).
* to appear in Int'l J. Astrobiology, vol.4, iss.2 (June 2005); 19 pages, 7 figs
Field Geology with a Wearable Computer: First Results of the Cyborg Astrobiologist System
Sep 15, 2004We present results from the first geological field tests of the `Cyborg Astrobiologist', which is a wearable computer and video camcorder system that we are using to test and train a computer-vision system towards having some of the autonomous decision-making capabilities of a field-geologist. The Cyborg Astrobiologist platform has thus far been used for testing and development of these algorithms and systems: robotic acquisition of quasi-mosaics of images, real-time image segmentation, and real-time determination of interesting points in the image mosaics. The hardware and software systems function reliably, and the computer-vision algorithms are adequate for the first field tests. In addition to the proof-of-concept aspect of these field tests, the main result of these field tests is the enumeration of those issues that we can improve in the future, including: dealing with structural shadow and microtexture, and also, controlling the camera's zoom lens in an intelligent manner. Nonetheless, despite these and other technical inadequacies, this Cyborg Astrobiologist system, consisting of a camera-equipped wearable-computer and its computer-vision algorithms, has demonstrated its ability of finding genuinely interesting points in real-time in the geological scenery, and then gathering more information about these interest points in an automated manner.