 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeField geology with a wearable computer: 1st results of the Cyborg Astrobiologist System
Paper and Code
Jun 24, 2005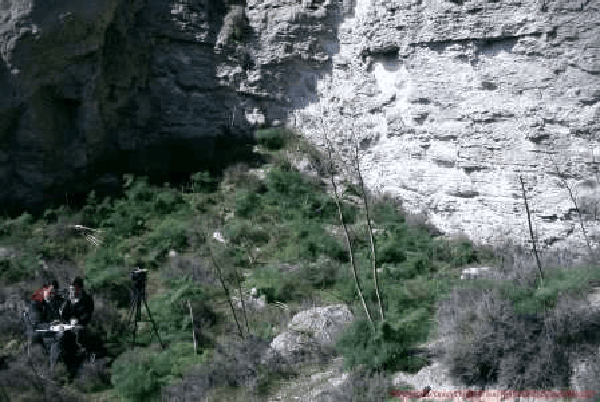
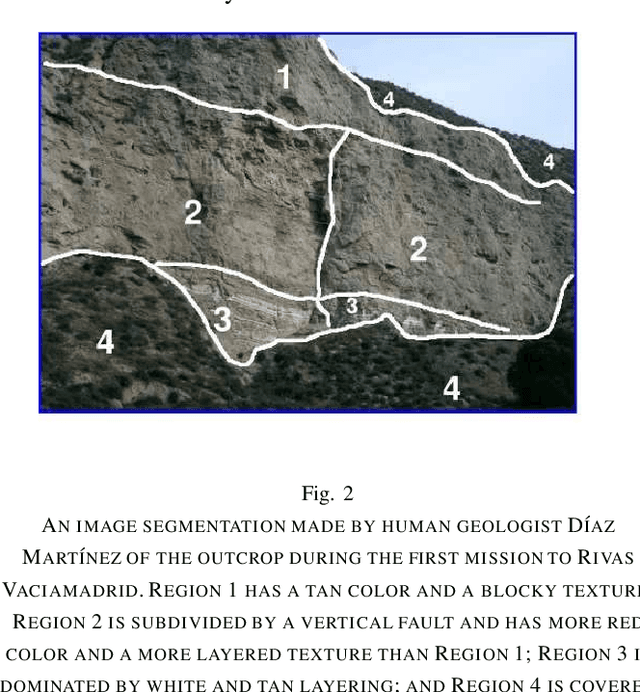
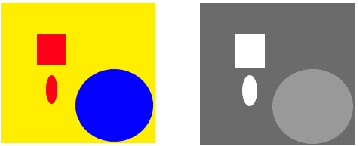
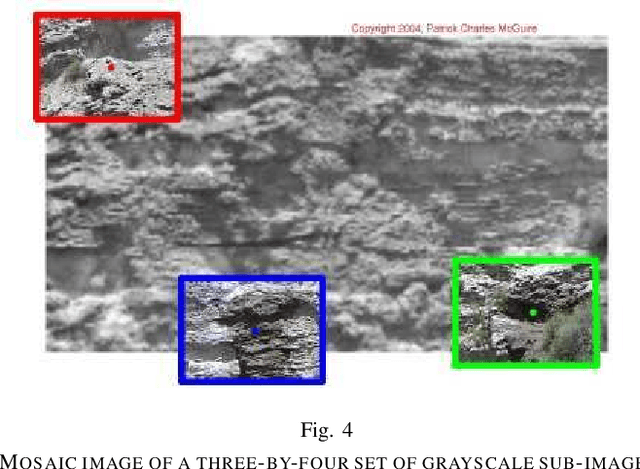
We present results from the first geological field tests of the `Cyborg Astrobiologist', which is a wearable computer and video camcorder system that we are using to test and train a computer-vision system towards having some of the autonomous decision-making capabilities of a field-geologist. The Cyborg Astrobiologist platform has thus far been used for testing and development of these algorithms and systems: robotic acquisition of quasi-mosaics of images, real-time image segmentation, and real-time determination of interesting points in the image mosaics. This work is more of a test of the whole system, rather than of any one part of the system. However, beyond the concept of the system itself, the uncommon map (despite its simplicity) is the main innovative part of the system. The uncommon map helps to determine interest-points in a context-free manner. Overall, the hardware and software systems function reliably, and the computer-vision algorithms are adequate for the first field tests. In addition to the proof-of-concept aspect of these field tests, the main result of these field tests is the enumeration of those issues that we can improve in the future, including: dealing with structural shadow and microtexture, and also, controlling the camera's zoom lens in an intelligent manner. Nonetheless, despite these and other technical inadequacies, this Cyborg Astrobiologist system, consisting of a camera-equipped wearable-computer and its computer-vision algorithms, has demonstrated its ability of finding genuinely interesting points in real-time in the geological scenery, and then gathering more information about these interest points in an automated manner. We use these capabilities for autonomous guidance towards geological points-of-interest.