 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring the Limitations of Behavior Cloning for Autonomous Driving
Apr 18, 2019
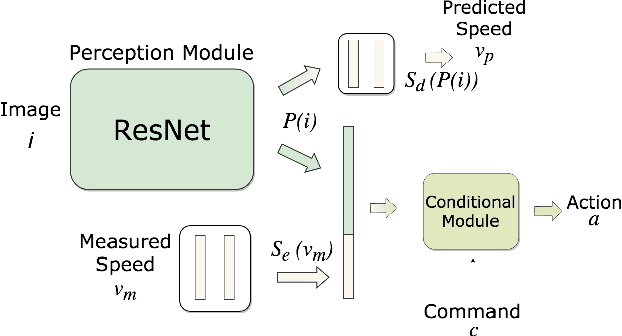

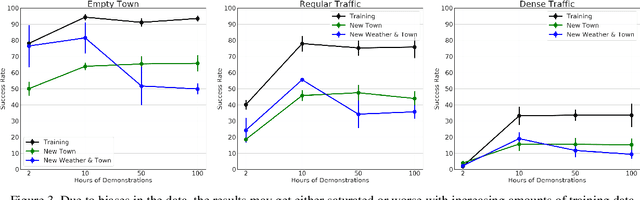
Driving requires reacting to a wide variety of complex environment conditions and agent behaviors. Explicitly modeling each possible scenario is unrealistic. In contrast, imitation learning can, in theory, leverage data from large fleets of human-driven cars. Behavior cloning in particular has been successfully used to learn simple visuomotor policies end-to-end, but scaling to the full spectrum of driving behaviors remains an unsolved problem. In this paper, we propose a new benchmark to experimentally investigate the scalability and limitations of behavior cloning. We show that behavior cloning leads to state-of-the-art results, including in unseen environments, executing complex lateral and longitudinal maneuvers without these reactions being explicitly programmed. However, we confirm well-known limitations (due to dataset bias and overfitting), new generalization issues (due to dynamic objects and the lack of a causal model), and training instability requiring further research before behavior cloning can graduate to real-world driving. The code of the studied behavior cloning approaches can be found at https://github.com/felipecode/coiltraine .
A Commute in Data: The comma2k19 Dataset
Dec 14, 2018



comma.ai presents comma2k19, a dataset of over 33 hours of commute in California's 280 highway. This means 2019 segments, 1 minute long each, on a 20km section of highway driving between California's San Jose and San Francisco. The dataset was collected using comma EONs that have sensors similar to those of any modern smartphone including a road-facing camera, phone GPS, thermometers and a 9-axis IMU. Additionally, the EON captures raw GNSS measurements and all CAN data sent by the car with a comma grey panda. Laika, an open-source GNSS processing library, is also introduced here. Laika produces 40% more accurate positions than the GNSS module used to collect the raw data. This dataset includes pose (position + orientation) estimates in a global reference frame of the recording camera. These poses were computed with a tightly coupled INS/GNSS/Vision optimizer that relies on data processed by Laika. comma2k19 is ideal for development and validation of tightly coupled GNSS algorithms and mapping algorithms that work with commodity sensors.
Exploiting Spatio-Temporal Structure with Recurrent Winner-Take-All Networks
Mar 15, 2017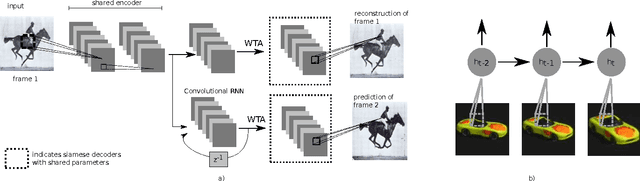

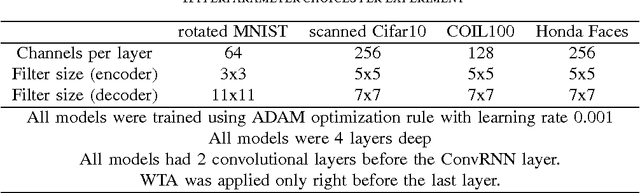
We propose a convolutional recurrent neural network, with Winner-Take-All dropout for high dimensional unsupervised feature learning in multi-dimensional time series. We apply the proposedmethod for object recognition with temporal context in videos and obtain better results than comparable methods in the literature, including the Deep Predictive Coding Networks previously proposed by Chalasani and Principe.Our contributions can be summarized as a scalable reinterpretation of the Deep Predictive Coding Networks trained end-to-end with backpropagation through time, an extension of the previously proposed Winner-Take-All Autoencoders to sequences in time, and a new technique for initializing and regularizing convolutional-recurrent neural networks.
Learning a Driving Simulator
Aug 03, 2016



Comma.ai's approach to Artificial Intelligence for self-driving cars is based on an agent that learns to clone driver behaviors and plans maneuvers by simulating future events in the road. This paper illustrates one of our research approaches for driving simulation. One where we learn to simulate. Here we investigate variational autoencoders with classical and learned cost functions using generative adversarial networks for embedding road frames. Afterwards, we learn a transition model in the embedded space using action conditioned Recurrent Neural Networks. We show that our approach can keep predicting realistic looking video for several frames despite the transition model being optimized without a cost function in the pixel space.
Information Theoretic-Learning Auto-Encoder
Mar 22, 2016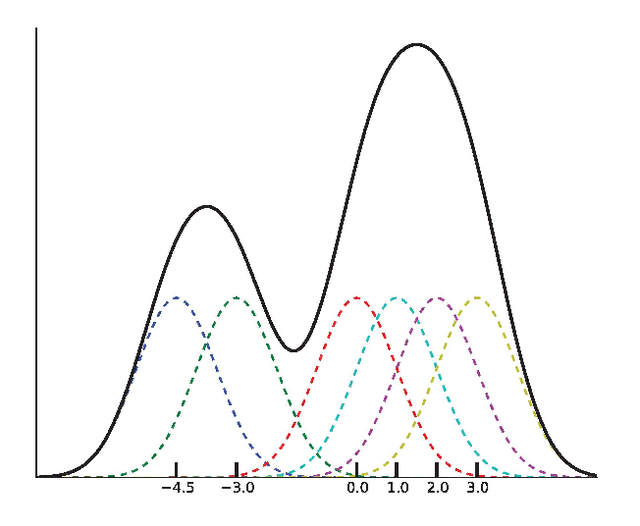
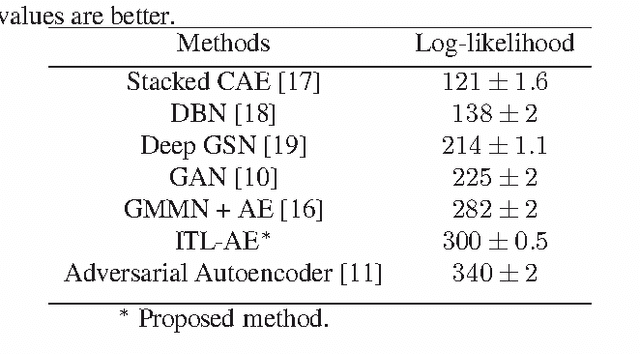
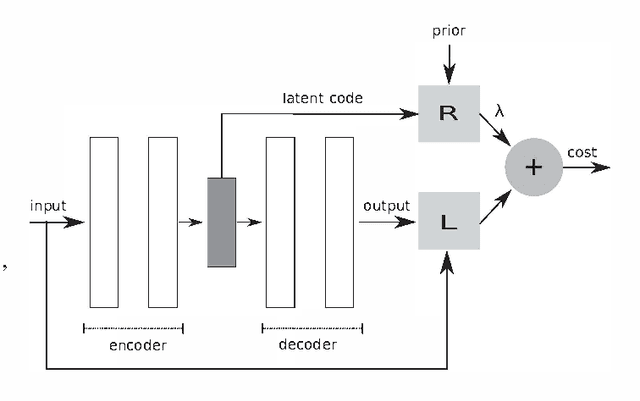
We propose Information Theoretic-Learning (ITL) divergence measures for variational regularization of neural networks. We also explore ITL-regularized autoencoders as an alternative to variational autoencoding bayes, adversarial autoencoders and generative adversarial networks for randomly generating sample data without explicitly defining a partition function. This paper also formalizes, generative moment matching networks under the ITL framework.