 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Drive from a World Model
Apr 27, 2025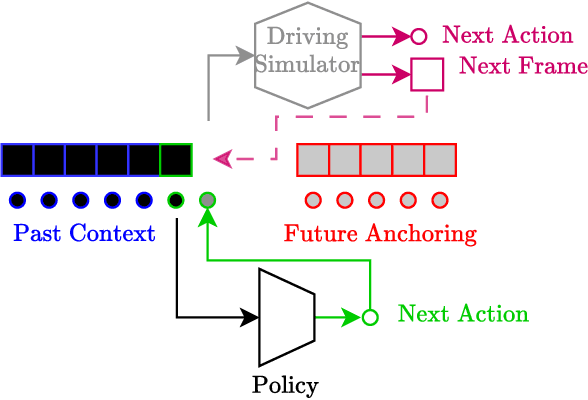

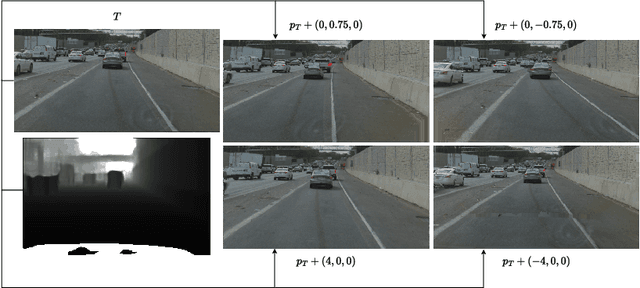

Most self-driving systems rely on hand-coded perception outputs and engineered driving rules. Learning directly from human driving data with an end-to-end method can allow for a training architecture that is simpler and scales well with compute and data. In this work, we propose an end-to-end training architecture that uses real driving data to train a driving policy in an on-policy simulator. We show two different methods of simulation, one with reprojective simulation and one with a learned world model. We show that both methods can be used to train a policy that learns driving behavior without any hand-coded driving rules. We evaluate the performance of these policies in a closed-loop simulation and when deployed in a real-world advanced driver-assistance system.
Learning a Driving Simulator
Aug 03, 2016



Comma.ai's approach to Artificial Intelligence for self-driving cars is based on an agent that learns to clone driver behaviors and plans maneuvers by simulating future events in the road. This paper illustrates one of our research approaches for driving simulation. One where we learn to simulate. Here we investigate variational autoencoders with classical and learned cost functions using generative adversarial networks for embedding road frames. Afterwards, we learn a transition model in the embedded space using action conditioned Recurrent Neural Networks. We show that our approach can keep predicting realistic looking video for several frames despite the transition model being optimized without a cost function in the pixel space.