 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthesis and Deployment of Maximal Robust Control Barrier Functions through Adversarial Reinforcement Learning
Apr 14, 2026Robust control barrier functions (CBFs) provide a principled mechanism for smooth safety enforcement under worst-case disturbances. However, existing approaches typically rely on explicit, closed-form structure in the dynamics (e.g., control-affine) and uncertainty models. This has led to limited scalability and generality, with most robust CBFs certifying only conservative subsets of the maximal robust safe set. In this paper, we introduce a new robust CBF framework for general nonlinear systems under bounded uncertainty. We first show that the safety value function solving the dynamic programming Isaacs equation is a valid robust discrete-time CBF that enforces safety on the maximal robust safe set. We then adopt the key reinforcement learning (RL) notion of quality function (or Q-function), which removes the need for explicit dynamics by lifting the barrier certificate into state-action space and yields a novel robust Q-CBF constraint for safety filtering. Combined with adversarial RL, this enables the synthesis and deployment of robust Q-CBFs on general nonlinear systems with black-box dynamics and unknown uncertainty structure. We validate the framework on a canonical inverted pendulum benchmark and a 36-D quadruped simulator, achieving substantially less conservative safe sets than barrier-based baselines on the pendulum and reliable safety enforcement even under adversarial uncertainty realizations on the quadruped.
Gameplay Filters: Safe Robot Walking through Adversarial Imagination
May 01, 2024
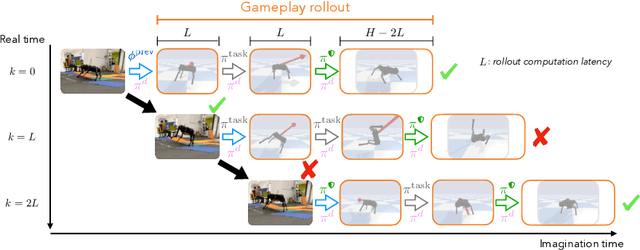
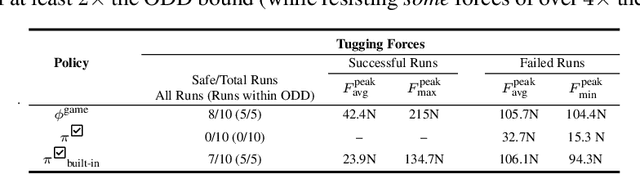
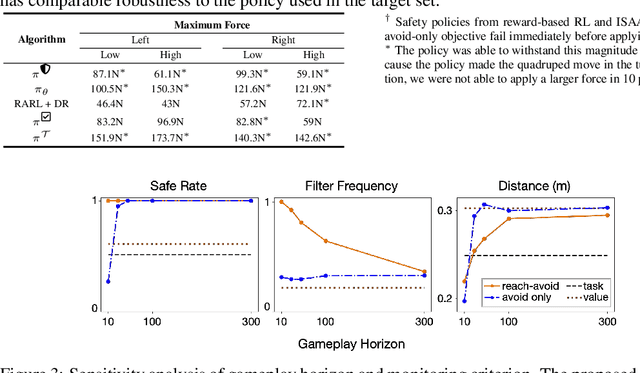
Ensuring the safe operation of legged robots in uncertain, novel environments is crucial to their widespread adoption. Despite recent advances in safety filters that can keep arbitrary task-driven policies from incurring safety failures, existing solutions for legged robot locomotion still rely on simplified dynamics and may fail when the robot is perturbed away from predefined stable gaits. This paper presents a general approach that leverages offline game-theoretic reinforcement learning to synthesize a highly robust safety filter for high-order nonlinear dynamics. This gameplay filter then maintains runtime safety by continually simulating adversarial futures and precluding task-driven actions that would cause it to lose future games (and thereby violate safety). Validated on a 36-dimensional quadruped robot locomotion task, the gameplay safety filter exhibits inherent robustness to the sim-to-real gap without manual tuning or heuristic designs. Physical experiments demonstrate the effectiveness of the gameplay safety filter under perturbations, such as tugging and unmodeled irregular terrains, while simulation studies shed light on how to trade off computation and conservativeness without compromising safety.