Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparsification of Motion-Planning Roadmaps by Edge Contraction
Sep 20, 2012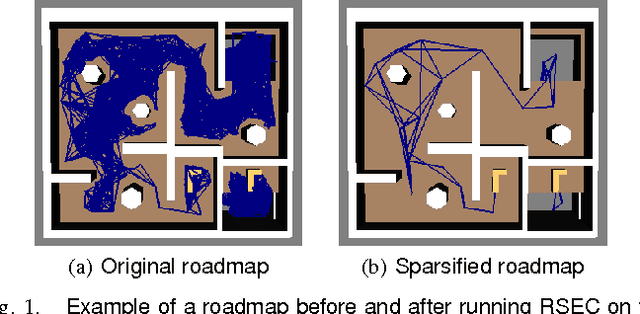
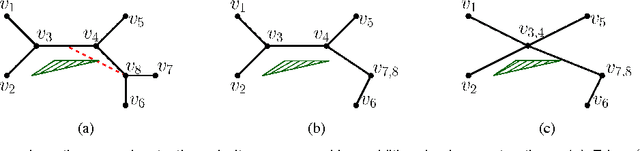
We present Roadmap Sparsification by Edge Contraction (RSEC), a simple and effective algorithm for reducing the size of a motion-planning roadmap. The algorithm exhibits minimal effect on the quality of paths that can be extracted from the new roadmap. The primitive operation used by RSEC is edge contraction - the contraction of a roadmap edge to a single vertex and the connection of the new vertex to the neighboring vertices of the contracted edge. For certain scenarios, we compress more than 98% of the edges and vertices at the cost of degradation of average shortest path length by at most 2%.
Via