 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSnake Robot Gait Decomposition and Gait Parameter Optimization
Dec 03, 2021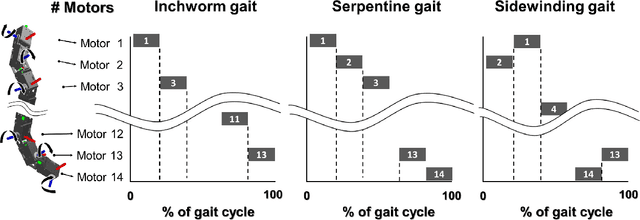
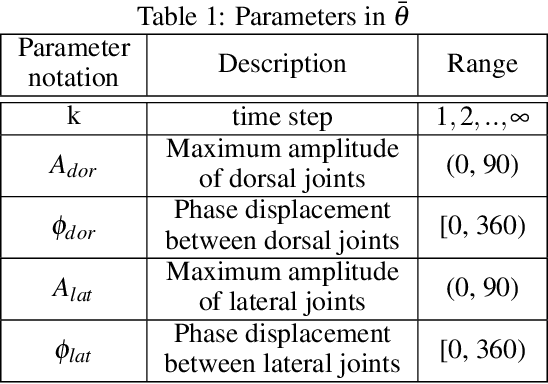
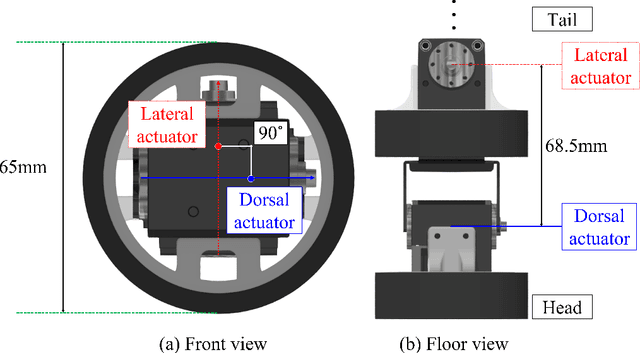
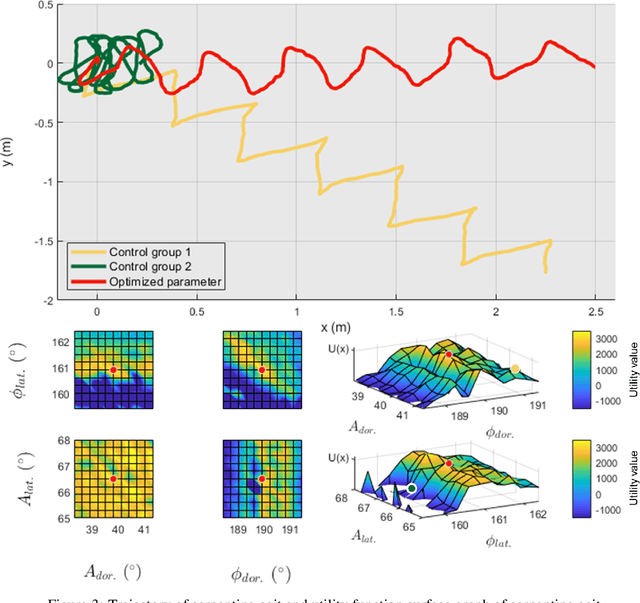
This paper proposes Gait Decomposition (G.D), a method of mathematically decomposing snake movements, and Gait Parameter Gradient (GPG), a method of optimizing decomposed gait parameters. G.D is a method that can express the snake gait mathematically and concisely from generating movement using the curve function to the motor control order when generating movement of snake robot. Through this method, the gait of the snake robot can be intuitively classified into a matrix, as well as flexibly adjusting the parameters of the curve function required for gait generation. This can solve the problem that parameter tuning, which is the reason why it is difficult for a snake robot to practical use, is difficult. Therefore, if this G.D is applied to snake robots, various gaits can be generated with a few of parameters, so snake robots can be used in many fields. We also implemented the GPG algorithm to optimize the gait curve function as well as define the gait of the snake robot through G.D.
Real-Time Navigation System for a Low-Cost Mobile Robot with an RGB-D Camera
Mar 04, 2021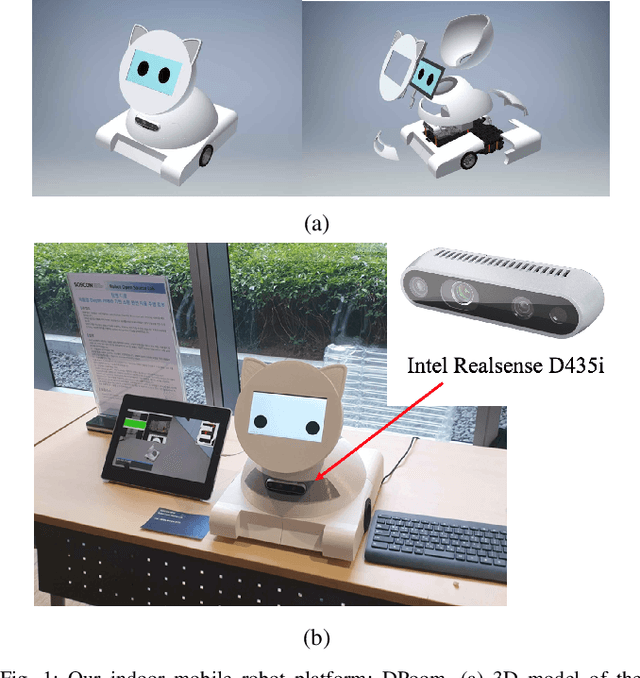
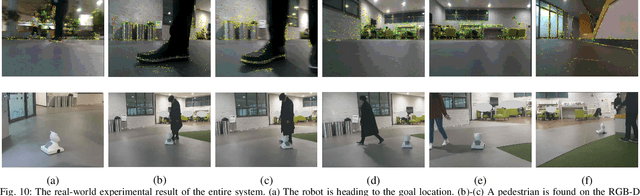
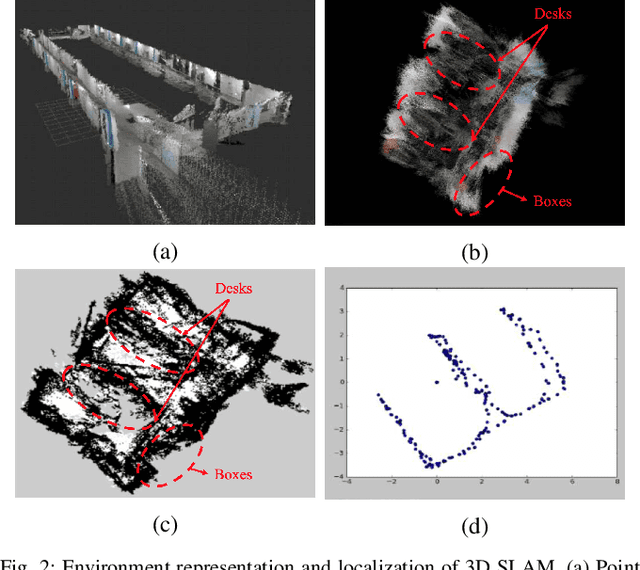
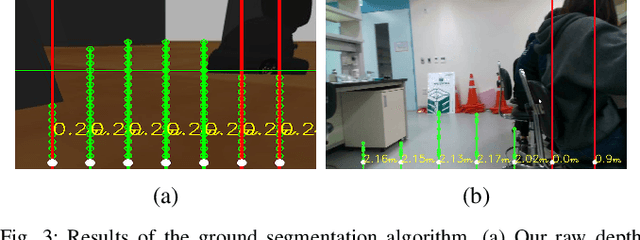
Currently, mobile robots are developing rapidly and are finding numerous applications in industry. However, there remain a number of problems related to their practical use, such as the need for expensive hardware and their high power consumption levels. In this study, we propose a navigation system that is operable on a low-end computer with an RGB-D camera and a mobile robot platform for the operation of an integrated autonomous driving system. The proposed system does not require LiDARs or a GPU. Our raw depth image ground segmentation approach extracts a traversability map for the safe driving of low-body mobile robots. It is designed to guarantee real-time performance on a low-cost commercial single board computer with integrated SLAM, global path planning, and motion planning. Running sensor data processing and other autonomous driving functions simultaneously, our navigation method performs rapidly at a refresh rate of 18Hz for control command, whereas other systems have slower refresh rates. Our method outperforms current state-of-the-art navigation approaches as shown in 3D simulation tests. In addition, we demonstrate the applicability of our mobile robot system through successful autonomous driving in a residential lobby.