 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSnake Robot Gait Decomposition and Gait Parameter Optimization
Paper and Code
Dec 03, 2021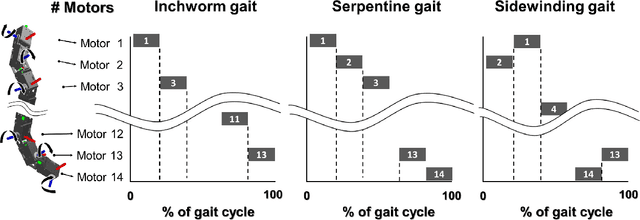
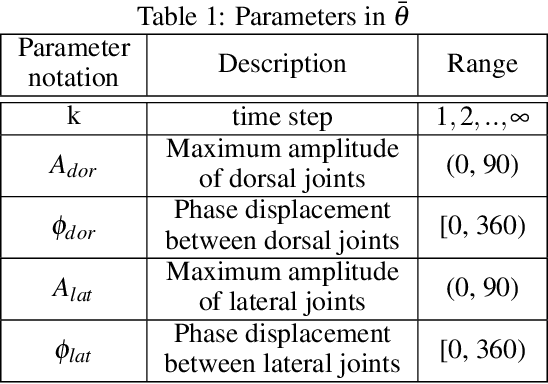
This paper proposes Gait Decomposition (G.D), a method of mathematically decomposing snake movements, and Gait Parameter Gradient (GPG), a method of optimizing decomposed gait parameters. G.D is a method that can express the snake gait mathematically and concisely from generating movement using the curve function to the motor control order when generating movement of snake robot. Through this method, the gait of the snake robot can be intuitively classified into a matrix, as well as flexibly adjusting the parameters of the curve function required for gait generation. This can solve the problem that parameter tuning, which is the reason why it is difficult for a snake robot to practical use, is difficult. Therefore, if this G.D is applied to snake robots, various gaits can be generated with a few of parameters, so snake robots can be used in many fields. We also implemented the GPG algorithm to optimize the gait curve function as well as define the gait of the snake robot through G.D.