 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrime the search: Using large language models for guiding geometric task and motion planning by warm-starting tree search
Jun 08, 2025The problem of relocating a set of objects to designated areas amidst movable obstacles can be framed as a Geometric Task and Motion Planning (G-TAMP) problem, a subclass of task and motion planning (TAMP). Traditional approaches to G-TAMP have relied either on domain-independent heuristics or on learning from planning experience to guide the search, both of which typically demand significant computational resources or data. In contrast, humans often use common sense to intuitively decide which objects to manipulate in G-TAMP problems. Inspired by this, we propose leveraging Large Language Models (LLMs), which have common sense knowledge acquired from internet-scale data, to guide task planning in G-TAMP problems. To enable LLMs to perform geometric reasoning, we design a predicate-based prompt that encodes geometric information derived from a motion planning algorithm. We then query the LLM to generate a task plan, which is then used to search for a feasible set of continuous parameters. Since LLMs are prone to mistakes, instead of committing to LLM's outputs, we extend Monte Carlo Tree Search (MCTS) to a hybrid action space and use the LLM to guide the search. Unlike the previous approach that calls an LLM at every node and incurs high computational costs, we use it to warm-start the MCTS with the nodes explored in completing the LLM's task plan. On six different G-TAMP problems, we show our method outperforms previous LLM planners and pure search algorithms. Code can be found at: https://github.com/iMSquared/prime-the-search
* The International Journal of Robotics Research (IJRR)
Design of a low-cost and lightweight 6 DoF bimanual arm for dynamic and contact-rich manipulation
Feb 24, 2025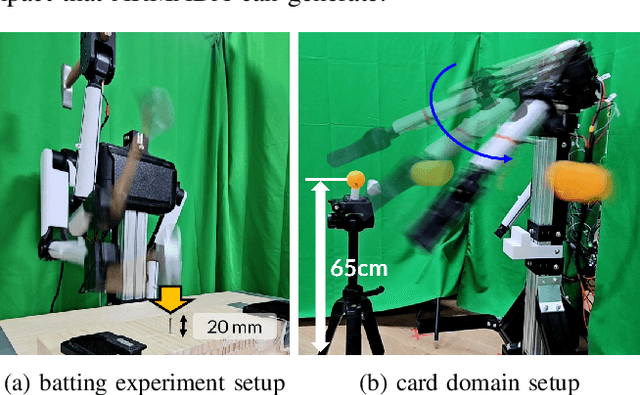
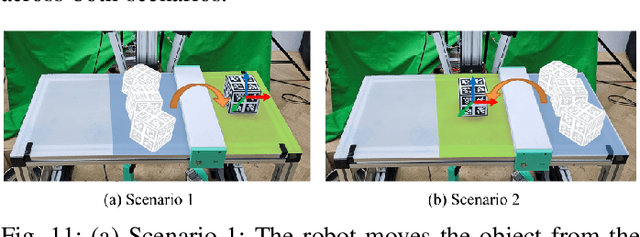
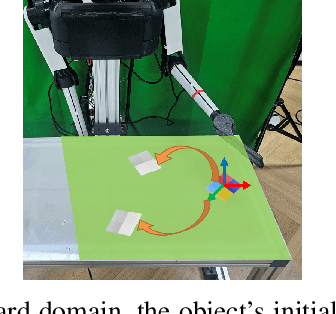
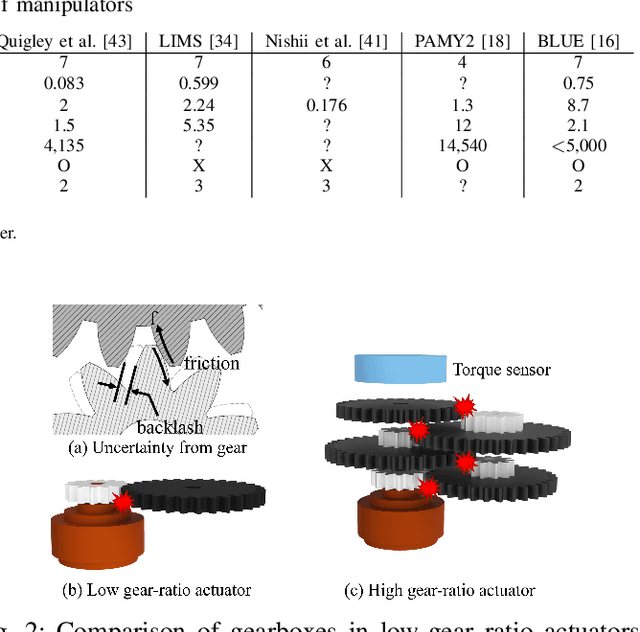
Dynamic and contact-rich object manipulation, such as striking, snatching, or hammering, remains challenging for robotic systems due to hardware limitations. Most existing robots are constrained by high-inertia design, limited compliance, and reliance on expensive torque sensors. To address this, we introduce ARMADA (Affordable Robot for Manipulation and Dynamic Actions), a 6 degrees-of-freedom bimanual robot designed for dynamic manipulation research. ARMADA combines low-inertia, back-drivable actuators with a lightweight design, using readily available components and 3D-printed links for ease of assembly in research labs. The entire system, including both arms, is built for just $6,100. Each arm achieves speeds up to 6.16m/s, almost twice that of most collaborative robots, with a comparable payload of 2.5kg. We demonstrate ARMADA can perform dynamic manipulation like snatching, hammering, and bimanual throwing in real-world environments. We also showcase its effectiveness in reinforcement learning (RL) by training a non-prehensile manipulation policy in simulation and transferring it zero-shot to the real world, as well as human motion shadowing for dynamic bimanual object throwing. ARMADA is fully open-sourced with detailed assembly instructions, CAD models, URDFs, simulation, and learning codes. We highly recommend viewing the supplementary video at https://sites.google.com/view/im2-humanoid-arm.