 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSVGS-DSGAT: An IoT-Enabled Innovation in Underwater Robotic Object Detection Technology
Jan 21, 2025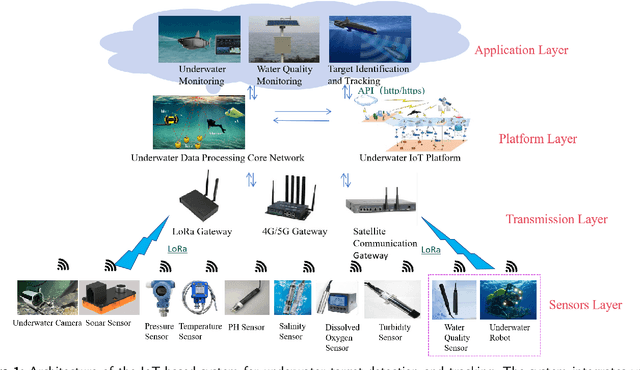
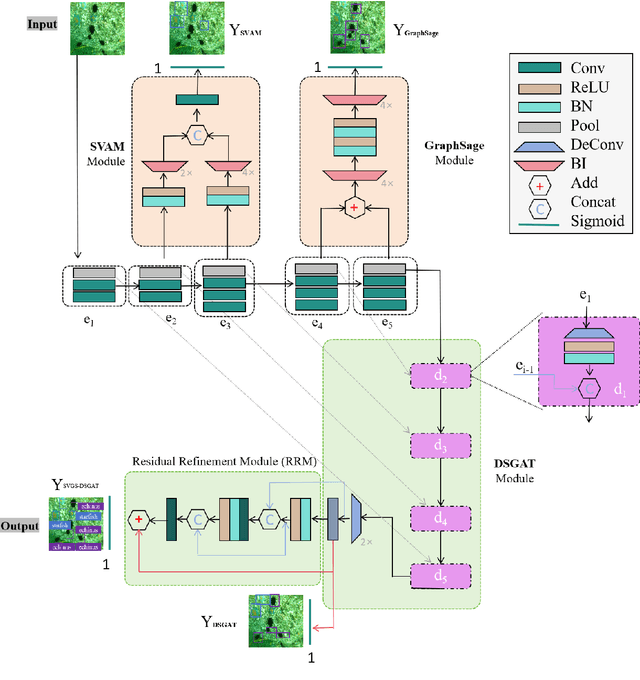
With the advancement of Internet of Things (IoT) technology, underwater target detection and tracking have become increasingly important for ocean monitoring and resource management. Existing methods often fall short in handling high-noise and low-contrast images in complex underwater environments, lacking precision and robustness. This paper introduces a novel SVGS-DSGAT model that combines GraphSage, SVAM, and DSGAT modules, enhancing feature extraction and target detection capabilities through graph neural networks and attention mechanisms. The model integrates IoT technology to facilitate real-time data collection and processing, optimizing resource allocation and model responsiveness. Experimental results demonstrate that the SVGS-DSGAT model achieves an mAP of 40.8% on the URPC 2020 dataset and 41.5% on the SeaDronesSee dataset, significantly outperforming existing mainstream models. This IoT-enhanced approach not only excels in high-noise and complex backgrounds but also improves the overall efficiency and scalability of the system. This research provides an effective IoT solution for underwater target detection technology, offering significant practical application value and broad development prospects.
* 17 pages, 8 figures
DNRSelect: Active Best View Selection for Deferred Neural Rendering
Jan 21, 2025



Deferred neural rendering (DNR) is an emerging computer graphics pipeline designed for high-fidelity rendering and robotic perception. However, DNR heavily relies on datasets composed of numerous ray-traced images and demands substantial computational resources. It remains under-explored how to reduce the reliance on high-quality ray-traced images while maintaining the rendering fidelity. In this paper, we propose DNRSelect, which integrates a reinforcement learning-based view selector and a 3D texture aggregator for deferred neural rendering. We first propose a novel view selector for deferred neural rendering based on reinforcement learning, which is trained on easily obtained rasterized images to identify the optimal views. By acquiring only a few ray-traced images for these selected views, the selector enables DNR to achieve high-quality rendering. To further enhance spatial awareness and geometric consistency in DNR, we introduce a 3D texture aggregator that fuses pyramid features from depth maps and normal maps with UV maps. Given that acquiring ray-traced images is more time-consuming than generating rasterized images, DNRSelect minimizes the need for ray-traced data by using only a few selected views while still achieving high-fidelity rendering results. We conduct detailed experiments and ablation studies on the NeRF-Synthetic dataset to demonstrate the effectiveness of DNRSelect. The code will be released.