 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal mesh generation for a blade passage using deep reinforcement learning
Sep 08, 2022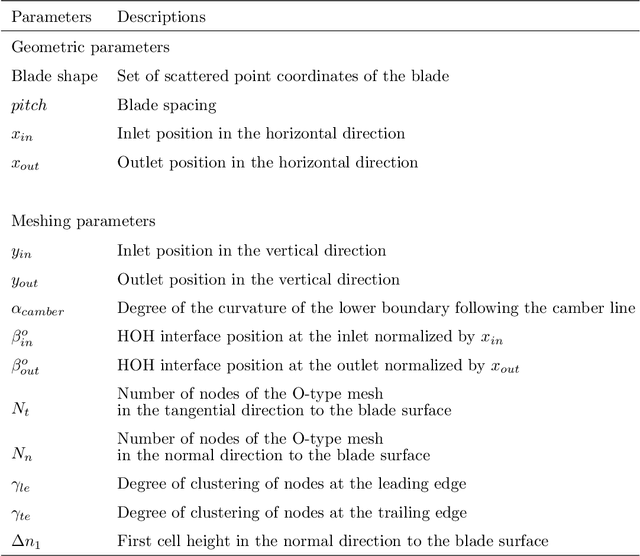
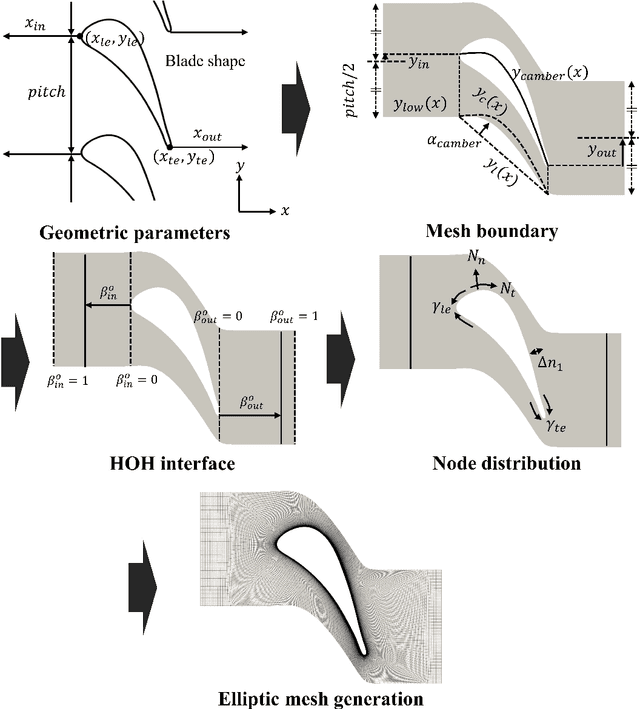
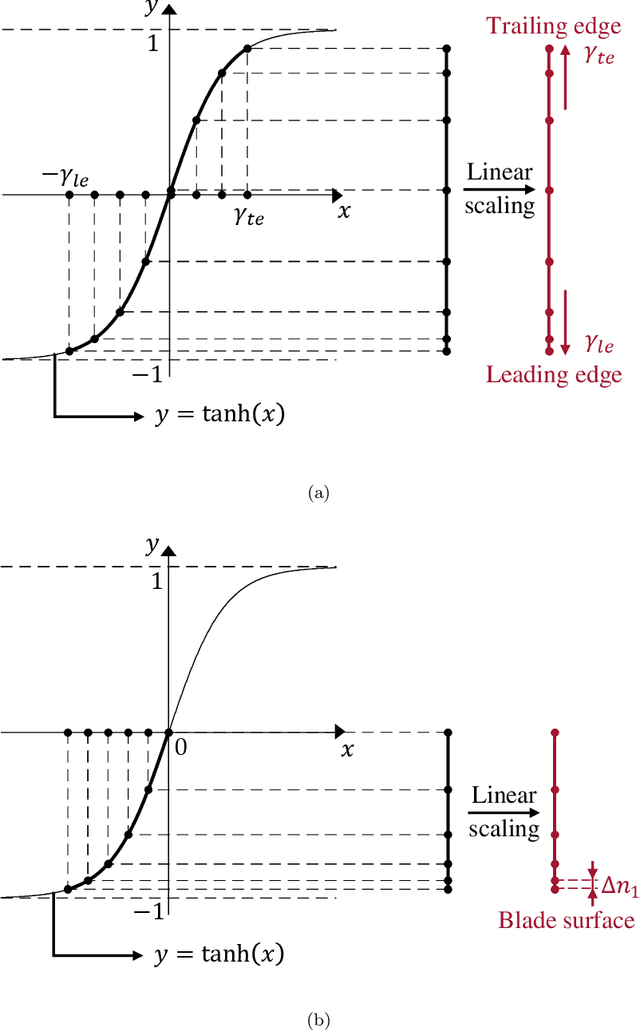
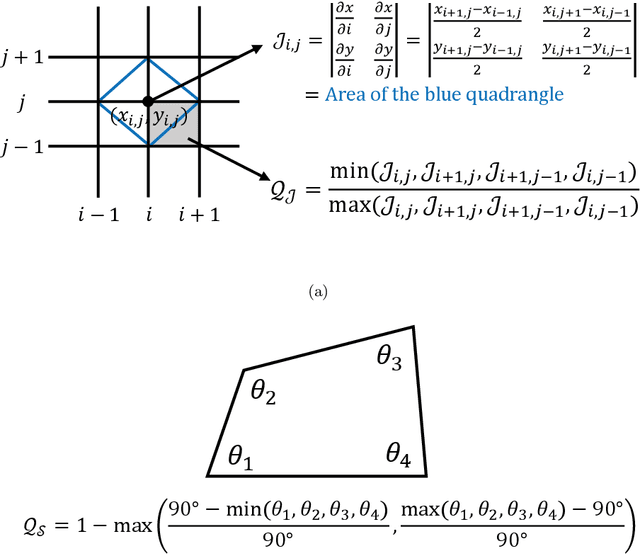
A mesh generation method that can generate an optimal mesh for a blade passage at a single attempt is developed using deep reinforcement learning (DRL). Unlike the conventional methods, where meshing parameters must be specified by the user or iteratively optimized from scratch for a newly given geometry, the developed method employs DRL-based multi-condition (MC) optimization to define meshing parameters for various geometries optimally. The method involves the following steps: (1) development of a base algorithm for structured mesh generation of a blade passage; (2) formulation of an MC optimization problem to optimize meshing parameters introduced while developing the base algorithm; and (3) development of a DRL-based mesh generation algorithm by solving the MC optimization problem using DRL. As a result, the developed algorithm is able to successfully generate optimal meshes at a single trial for various blades.
Control of a fly-mimicking flyer in complex flow using deep reinforcement learning
Nov 04, 2021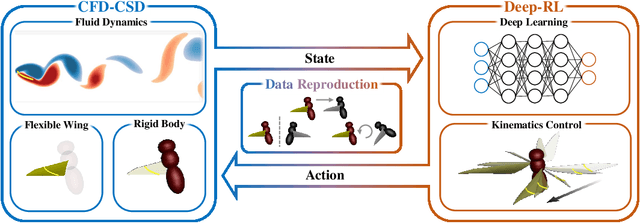
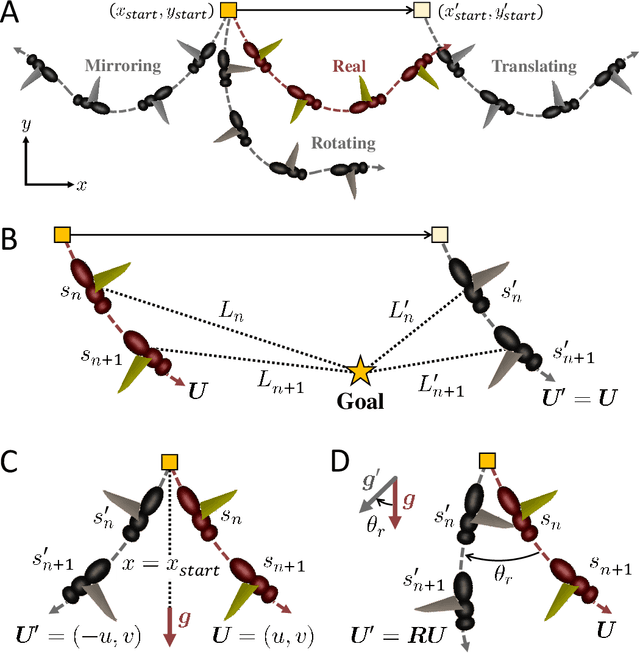
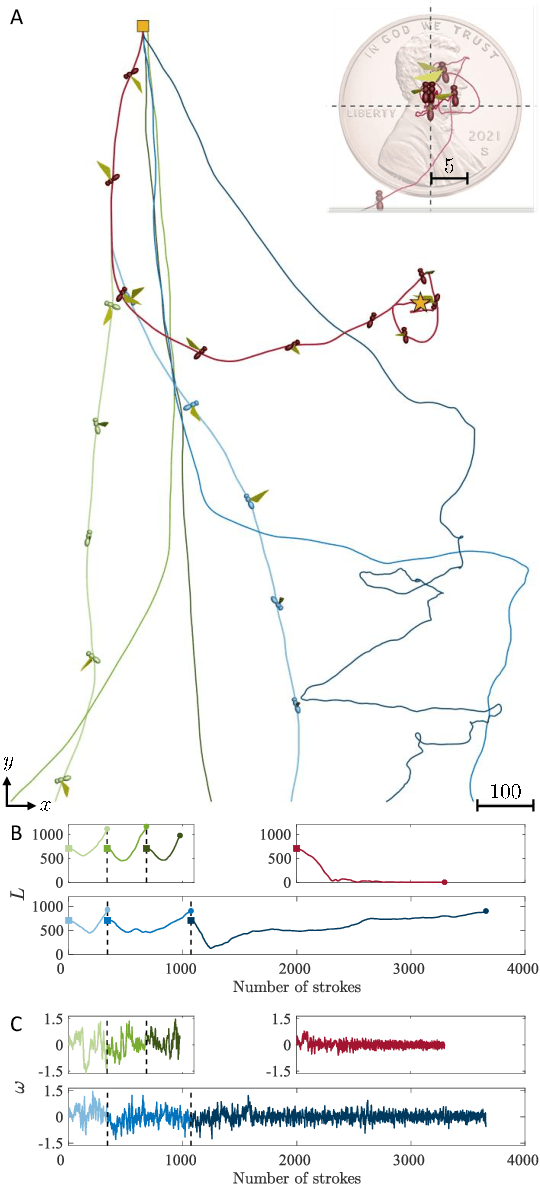
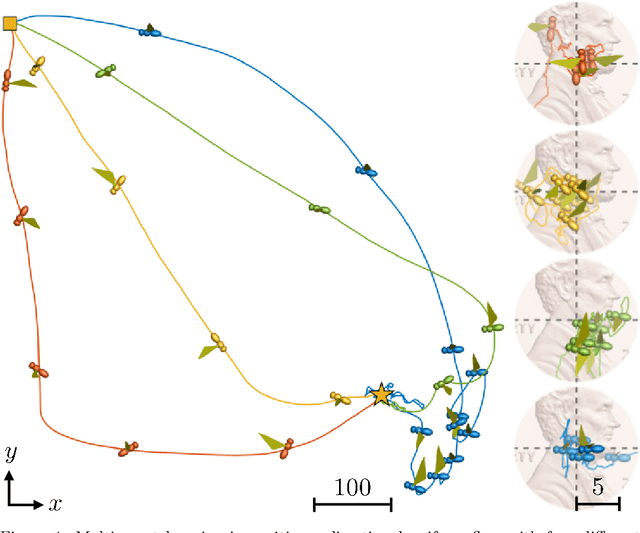
An integrated framework of computational fluid-structural dynamics (CFD-CSD) and deep reinforcement learning (deep-RL) is developed for control of a fly-scale flexible-winged flyer in complex flow. Dynamics of the flyer in complex flow is highly unsteady and nonlinear, which makes modeling the dynamics challenging. Thus, conventional control methodologies, where the dynamics is modeled, are insufficient for regulating such complicated dynamics. Therefore, in the present study, the integrated framework, in which the whole governing equations for fluid and structure are solved, is proposed to generate a control policy for the flyer. For the deep-RL to successfully learn the control policy, accurate and ample data of the dynamics are required. However, satisfying both the quality and quantity of the data on the intricate dynamics is extremely difficult since, in general, more accurate data are more costly. In the present study, two strategies are proposed to deal with the dilemma. To obtain accurate data, the CFD-CSD is adopted for precisely predicting the dynamics. To gain ample data, a novel data reproduction method is devised, where the obtained data are replicated for various situations while conserving the dynamics. With those data, the framework learns the control policy in various flow conditions and the learned policy is shown to have remarkable performance in controlling the flyer in complex flow fields.
Multi-condition multi-objective optimization using deep reinforcement learning
Oct 10, 2021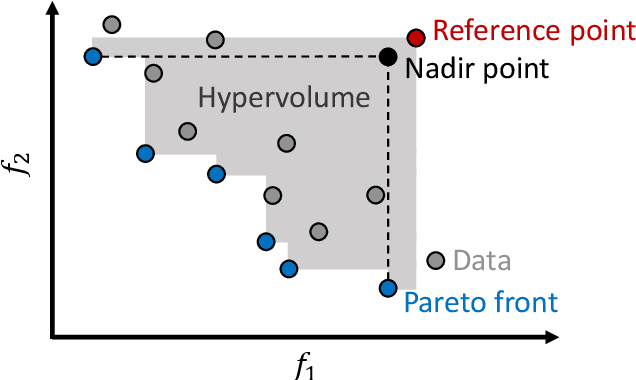
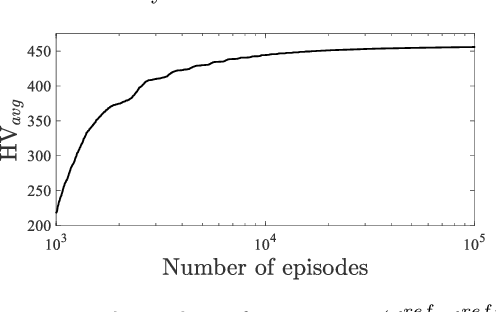
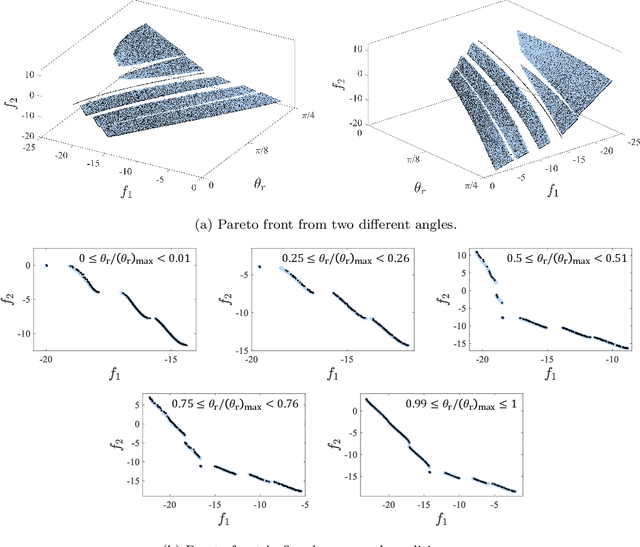
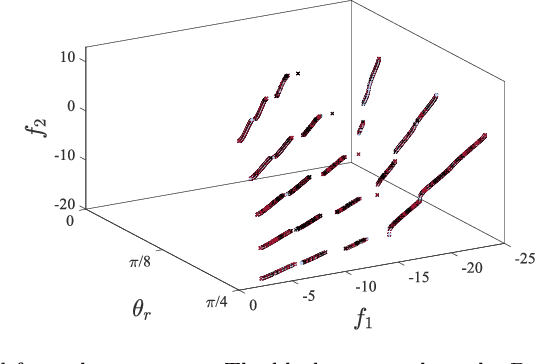
A multi-condition multi-objective optimization method that can find Pareto front over a defined condition space is developed for the first time using deep reinforcement learning. Unlike the conventional methods which perform optimization at a single condition, the present method learns the correlations between conditions and optimal solutions. The exclusive capability of the developed method is examined in the solutions of a novel modified Kursawe benchmark problem and an airfoil shape optimization problem which include nonlinear characteristics which are difficult to resolve using conventional optimization methods. Pareto front with high resolution over a defined condition space is successfully determined in each problem. Compared with multiple operations of a single-condition optimization method for multiple conditions, the present multi-condition optimization method based on deep reinforcement learning shows a greatly accelerated search of Pareto front by reducing the number of required function evaluations. An analysis of aerodynamics performance of airfoils with optimally designed shapes confirms that multi-condition optimization is indispensable to avoid significant degradation of target performance for varying flow conditions.
Typhoon track prediction using satellite images in a Generative Adversarial Network
Aug 16, 2018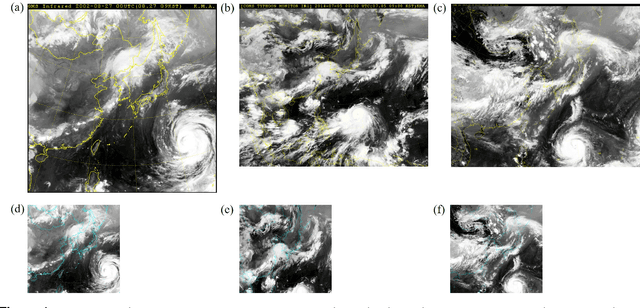

Tracks of typhoons are predicted using satellite images as input for a Generative Adversarial Network (GAN). The satellite images have time gaps of 6 hours and are marked with a red square at the location of the typhoon center. The GAN uses images from the past to generate an image one time step ahead. The generated image shows the future location of the typhoon center, as well as the future cloud structures. The errors between predicted and real typhoon centers are measured quantitatively in kilometers. 42.4% of all typhoon center predictions have absolute errors of less than 80 km, 32.1% lie within a range of 80 - 120 km and the remaining 25.5% have accuracies above 120 km. The relative error sets the above mentioned absolute error in relation to the distance that has been traveled by a typhoon over the past 6 hours. High relative errors are found in three types of situations, when a typhoon moves on the open sea far away from land, when a typhoon changes its course suddenly and when a typhoon is about to hit the mainland. The cloud structure prediction is evaluated qualitatively. It is shown that the GAN is able to predict trends in cloud motion. In order to improve both, the typhoon center and cloud motion prediction, the present study suggests to add information about the sea surface temperature, surface pressure and velocity fields to the input data.