 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDaDe: Delay-adaptive Detector for Streaming Perception
Dec 23, 2022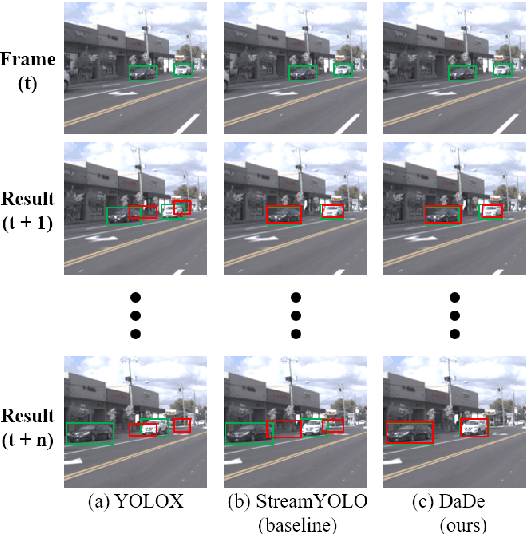

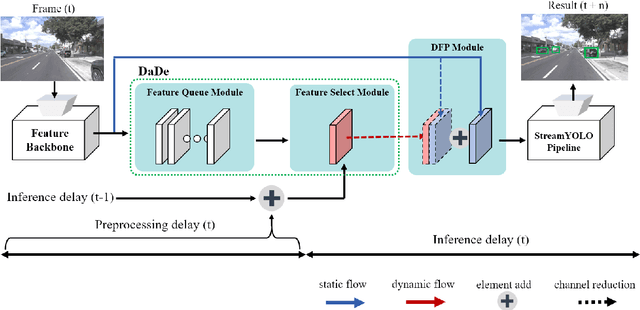

Recognizing the surrounding environment at low latency is critical in autonomous driving. In real-time environment, surrounding environment changes when processing is over. Current detection models are incapable of dealing with changes in the environment that occur after processing. Streaming perception is proposed to assess the latency and accuracy of real-time video perception. However, additional problems arise in real-world applications due to limited hardware resources, high temperatures, and other factors. In this study, we develop a model that can reflect processing delays in real time and produce the most reasonable results. By incorporating the proposed feature queue and feature select module, the system gains the ability to forecast specific time steps without any additional computational costs. Our method is tested on the Argoverse-HD dataset. It achieves higher performance than the current state-of-the-art methods(2022.12) in various environments when delayed . The code is available at https://github.com/danjos95/DADE
Talking Face Generation with Multilingual TTS
May 13, 2022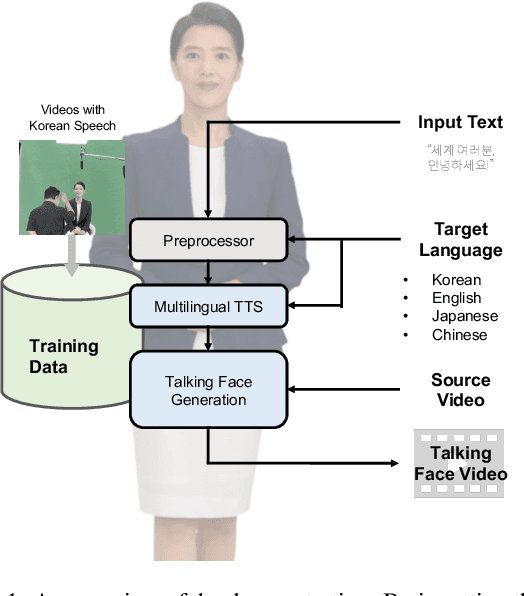
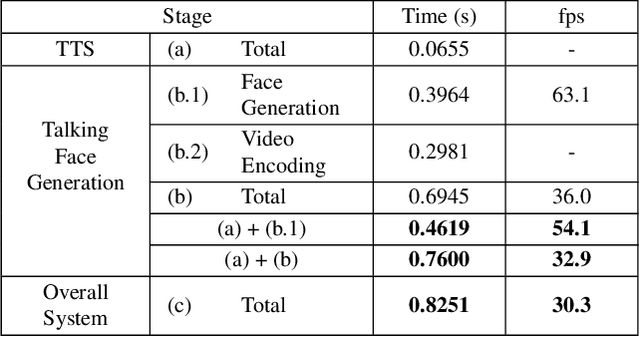

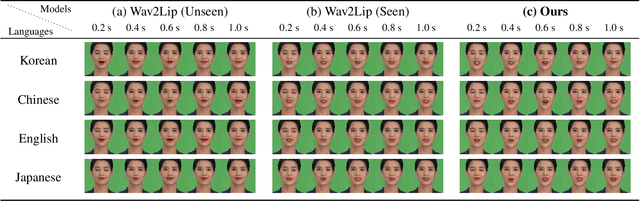
In this work, we propose a joint system combining a talking face generation system with a text-to-speech system that can generate multilingual talking face videos from only the text input. Our system can synthesize natural multilingual speeches while maintaining the vocal identity of the speaker, as well as lip movements synchronized to the synthesized speech. We demonstrate the generalization capabilities of our system by selecting four languages (Korean, English, Japanese, and Chinese) each from a different language family. We also compare the outputs of our talking face generation model to outputs of a prior work that claims multilingual support. For our demo, we add a translation API to the preprocessing stage and present it in the form of a neural dubber so that users can utilize the multilingual property of our system more easily.
3D Room Layout Estimation Beyond the Manhattan World Assumption
Sep 07, 2020



Predicting 3D room layout from single image is a challenging task with many applications. In this paper, we propose a new training and post-processing method for 3D room layout estimation, built on a recent state-of-the-art 3D room layout estimation model. Experimental results show our method outperforms state-of-the-art approaches by a large margin in predicting visible room layout. Our method has obtained the 3rd place in 2020 Holistic Scene Structures for 3D Vision Workshop.