 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSGANVO: Unsupervised Deep Visual Odometry and Depth Estimation with Stacked Generative Adversarial Networks
Jun 20, 2019
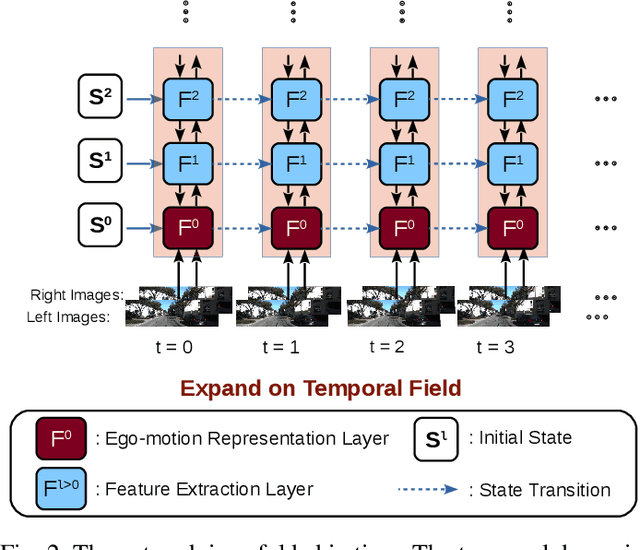
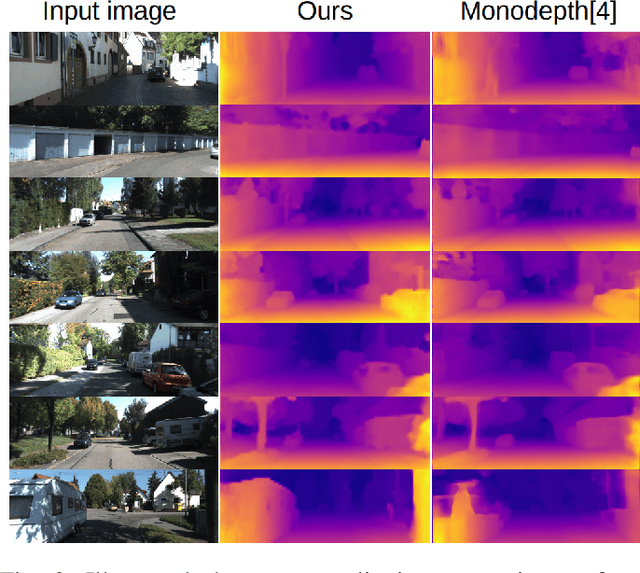
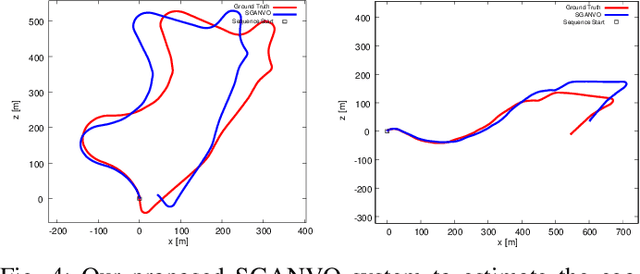
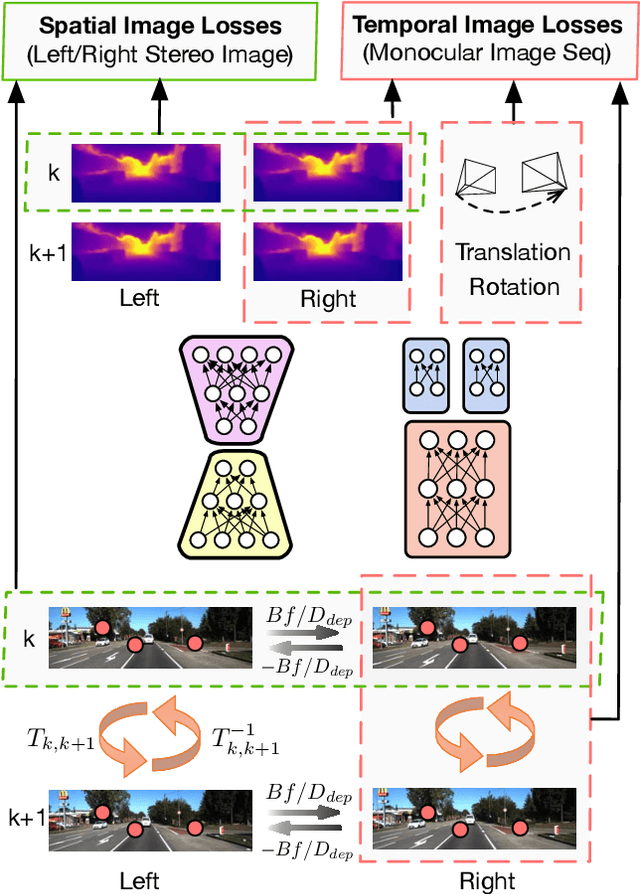
Recently end-to-end unsupervised deep learning methods have achieved an effect beyond geometric methods for visual depth and ego-motion estimation tasks. These data-based learning methods perform more robustly and accurately in some of the challenging scenes. The encoder-decoder network has been widely used in the depth estimation and the RCNN has brought significant improvements in the ego-motion estimation. Furthermore, the latest use of Generative Adversarial Nets(GANs) in depth and ego-motion estimation has demonstrated that the estimation could be further improved by generating pictures in the game learning process. This paper proposes a novel unsupervised network system for visual depth and ego-motion estimation: Stacked Generative Adversarial Network(SGANVO). It consists of a stack of GAN layers, of which the lowest layer estimates the depth and ego-motion while the higher layers estimate the spatial features. It can also capture the temporal dynamic due to the use of a recurrent representation across the layers. See Fig.1 for details. We select the most commonly used KITTI [1] data set for evaluation. The evaluation results show that our proposed method can produce better or comparable results in depth and ego-motion estimation.
UnDeepVO: Monocular Visual Odometry through Unsupervised Deep Learning
Feb 21, 2018

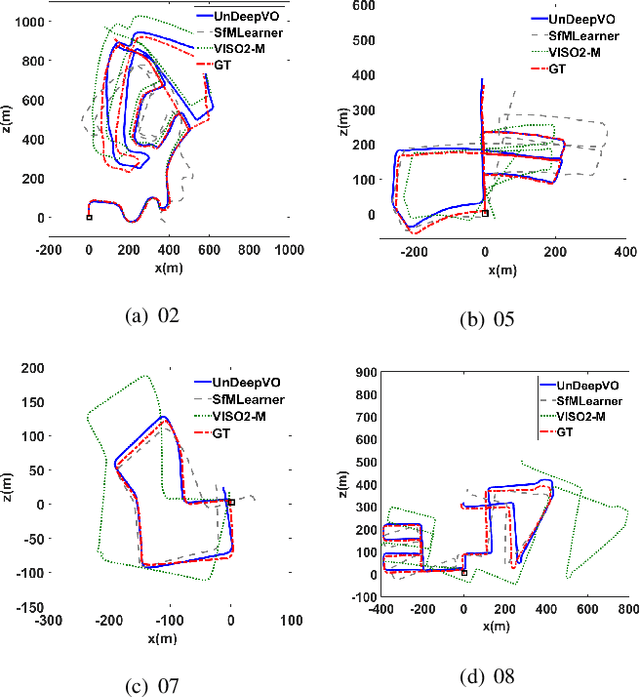
We propose a novel monocular visual odometry (VO) system called UnDeepVO in this paper. UnDeepVO is able to estimate the 6-DoF pose of a monocular camera and the depth of its view by using deep neural networks. There are two salient features of the proposed UnDeepVO: one is the unsupervised deep learning scheme, and the other is the absolute scale recovery. Specifically, we train UnDeepVO by using stereo image pairs to recover the scale but test it by using consecutive monocular images. Thus, UnDeepVO is a monocular system. The loss function defined for training the networks is based on spatial and temporal dense information. A system overview is shown in Fig. 1. The experiments on KITTI dataset show our UnDeepVO achieves good performance in terms of pose accuracy.
Exploring Dynamic Environments Using Stochastic Search Strategies
Feb 10, 2016
In this paper, we conduct a literature review of laws of motion based on stochastic search strategies which are mainly focused on exploring highly dynamic environments. In this regard, stochastic search strategies represent an interesting alternative to cope with uncertainty and reduced perceptual capabilities. This study aims to present an introductory overview of research in terms of directional rules and searching methods mainly based on bio-inspired approaches. This study critically examines the role of animal searching behavior applied to random walk models using stochastic rules and kinesis or taxis. The aim of this study is to examine existing techniques and to select relevant work on random walks and analyze their actual contributions. In this regard, we cover a wide range of displacement events with an orientation mechanism given by a reactive behavior or a source-seeking behavior. Finally, we conclude with a discussion concerning the usefulness of using optimal foraging strategies as a reliable methodology.