 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCR-SAM: Curvature Regularized Sharpness-Aware Minimization
Dec 23, 2023The capacity to generalize to future unseen data stands as one of the utmost crucial attributes of deep neural networks. Sharpness-Aware Minimization (SAM) aims to enhance the generalizability by minimizing worst-case loss using one-step gradient ascent as an approximation. However, as training progresses, the non-linearity of the loss landscape increases, rendering one-step gradient ascent less effective. On the other hand, multi-step gradient ascent will incur higher training cost. In this paper, we introduce a normalized Hessian trace to accurately measure the curvature of loss landscape on {\em both} training and test sets. In particular, to counter excessive non-linearity of loss landscape, we propose Curvature Regularized SAM (CR-SAM), integrating the normalized Hessian trace as a SAM regularizer. Additionally, we present an efficient way to compute the trace via finite differences with parallelism. Our theoretical analysis based on PAC-Bayes bounds establishes the regularizer's efficacy in reducing generalization error. Empirical evaluation on CIFAR and ImageNet datasets shows that CR-SAM consistently enhances classification performance for ResNet and Vision Transformer (ViT) models across various datasets. Our code is available at https://github.com/TrustAIoT/CR-SAM.
LRS: Enhancing Adversarial Transferability through Lipschitz Regularized Surrogate
Dec 20, 2023The transferability of adversarial examples is of central importance to transfer-based black-box adversarial attacks. Previous works for generating transferable adversarial examples focus on attacking \emph{given} pretrained surrogate models while the connections between surrogate models and adversarial trasferability have been overlooked. In this paper, we propose {\em Lipschitz Regularized Surrogate} (LRS) for transfer-based black-box attacks, a novel approach that transforms surrogate models towards favorable adversarial transferability. Using such transformed surrogate models, any existing transfer-based black-box attack can run without any change, yet achieving much better performance. Specifically, we impose Lipschitz regularization on the loss landscape of surrogate models to enable a smoother and more controlled optimization process for generating more transferable adversarial examples. In addition, this paper also sheds light on the connection between the inner properties of surrogate models and adversarial transferability, where three factors are identified: smaller local Lipschitz constant, smoother loss landscape, and stronger adversarial robustness. We evaluate our proposed LRS approach by attacking state-of-the-art standard deep neural networks and defense models. The results demonstrate significant improvement on the attack success rates and transferability. Our code is available at https://github.com/TrustAIoT/LRS.
GNP Attack: Transferable Adversarial Examples via Gradient Norm Penalty
Jul 09, 2023Adversarial examples (AE) with good transferability enable practical black-box attacks on diverse target models, where insider knowledge about the target models is not required. Previous methods often generate AE with no or very limited transferability; that is, they easily overfit to the particular architecture and feature representation of the source, white-box model and the generated AE barely work for target, black-box models. In this paper, we propose a novel approach to enhance AE transferability using Gradient Norm Penalty (GNP). It drives the loss function optimization procedure to converge to a flat region of local optima in the loss landscape. By attacking 11 state-of-the-art (SOTA) deep learning models and 6 advanced defense methods, we empirically show that GNP is very effective in generating AE with high transferability. We also demonstrate that it is very flexible in that it can be easily integrated with other gradient based methods for stronger transfer-based attacks.
Admiring the Great Mountain: A Celebration Special Issue in Honor of Stephen Grossbergs 80th Birthday
Sep 26, 2019This editorial summarizes selected key contributions of Prof. Stephen Grossberg and describes the papers in this 80th birthday special issue in his honor. His productivity, creativity, and vision would each be enough to mark a scientist of the first caliber. In combination, they have resulted in contributions that have changed the entire discipline of neural networks. Grossberg has been tremendously influential in engineering, dynamical systems, and artificial intelligence as well. Indeed, he has been one of the most important mentors and role models in my career, and has done so with extraordinary generosity and encouragement. All authors in this special issue have taken great pleasure in hereby commemorating his extraordinary career and contributions.
Neural Network Predictive Controller for Grid-Connected Virtual Synchronous Generator
Aug 14, 2019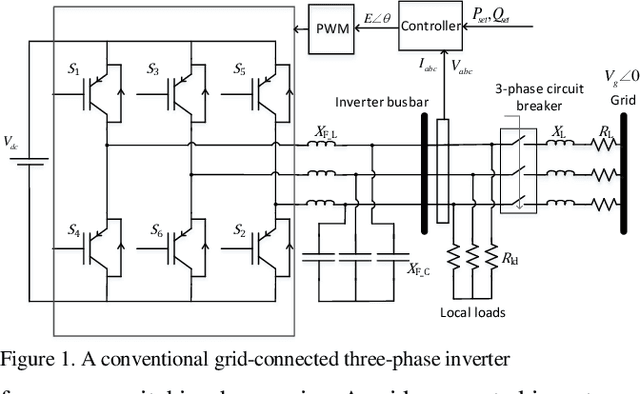
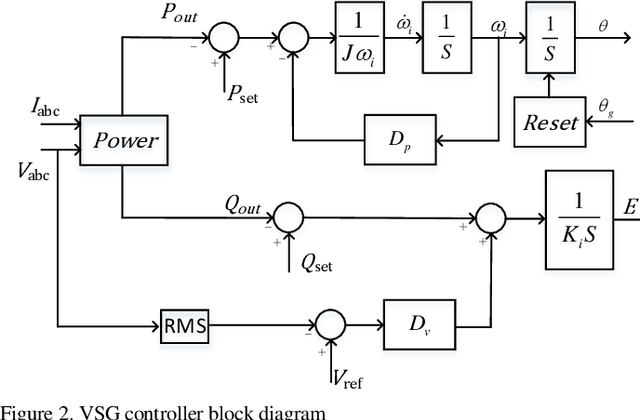
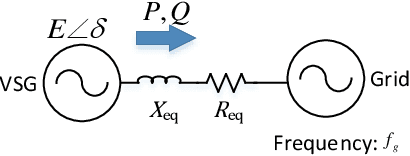
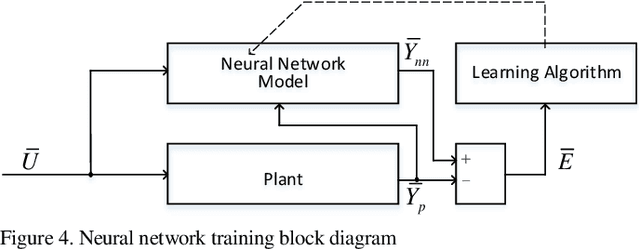
In this paper, a neural network predictive controller is proposed to regulate the active and the reactive power delivered to the grid generated by a three-phase virtual inertia-based inverter. The concept of the conventional virtual synchronous generator (VSG) is discussed, and it is shown that when the inverter is connected to non-inductive grids, the conventional PI-based VSGs are unable to perform acceptable tracking. The concept of the neural network predictive controller is also discussed to replace the traditional VSGs. This replacement enables inverters to perform in both inductive and non-inductive grids. The simulation results confirm that a well-trained neural network predictive controller illustrates can adapt to any grid impedance angle, compared to the traditional PI-based virtual inertia controllers.
Heuristic Dynamic Programming for Adaptive Virtual Synchronous Generators
Aug 14, 2019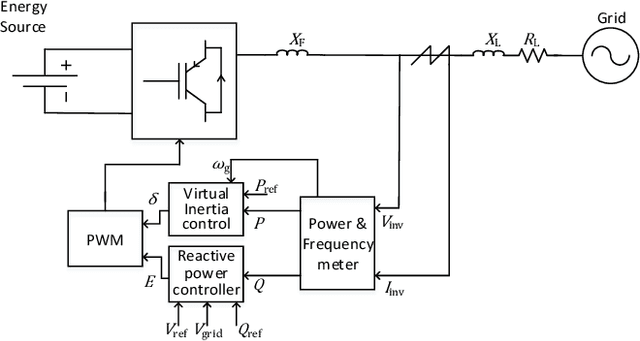
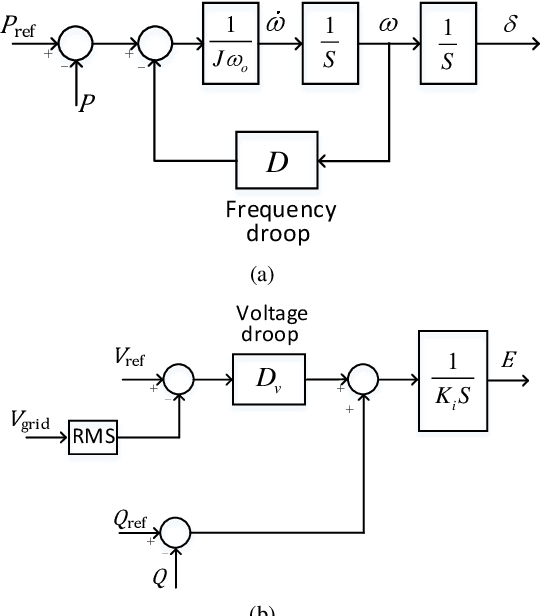
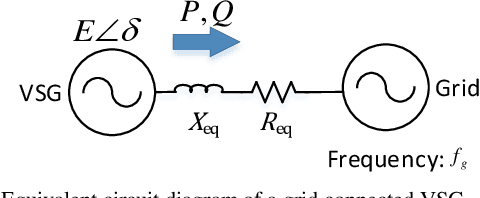
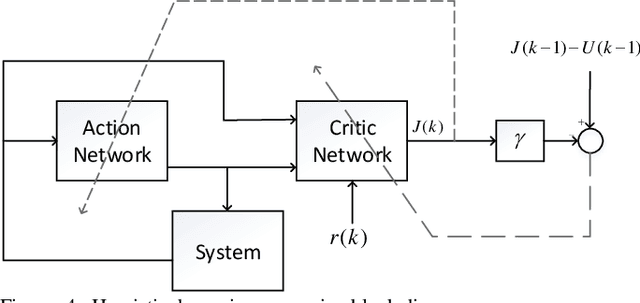
In this paper a neural network heuristic dynamic programing (HDP) is used for optimal control of the virtual inertia based control of grid connected three phase inverters. It is shown that the conventional virtual inertia controllers are not suited for non inductive grids. A neural network based controller is proposed to adapt to any impedance angle. Applying an adaptive dynamic programming controller instead of a supervised controlled method enables the system to adjust itself to different conditions. The proposed HDP consists of two subnetworks, critic network and action network. These networks can be trained during the same training cycle to decrease the training time. The simulation results confirm that the proposed neural network HDP controller performs better than the traditional direct fed voltage and reactive power controllers in virtual inertia control schemes.