 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAerial Manipulator Force Control Using Control Barrier Functions
Sep 14, 2023This article studies the problem of applying normal forces on a surface, using an underactuated aerial vehicle equipped with a dexterous robotic arm. A force-motion high-level controller is designed based on a Lyapunov function encompassing alignment and exerted force errors. This controller is coupled with a Control Barrier Function constraint under an optimization scheme using Quadratic Programming. This aims to enforce a prescribed relationship between the approaching motion for the end-effector and its alignment with the surface, thus ensuring safe operation. An adaptive low-level controller is devised for the aerial vehicle, capable of tracking velocity commands generated by the high-level controller. Simulations are presented to demonstrate the force exertion stability and safety of the controller in cases of large disturbances.
Modular Multi-Copter Structure Control for Cooperative Aerial Cargo Transportation
Oct 10, 2022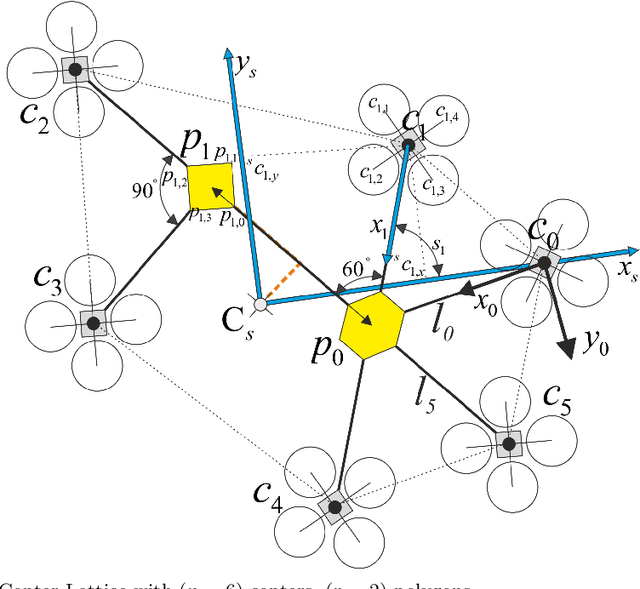
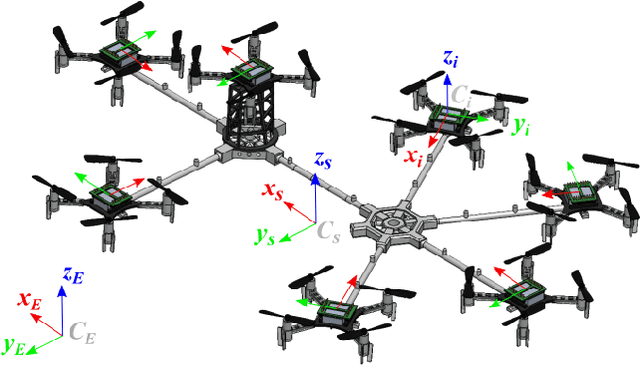
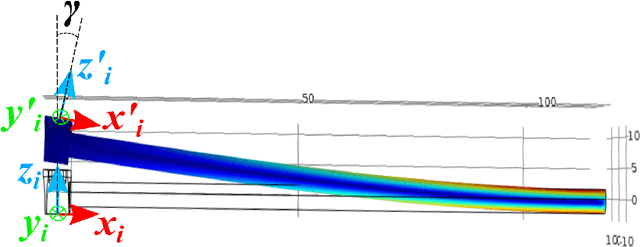

The control problem of a multi-copter swarm, mechanically coupled through a modular lattice structure of connecting rods, is considered in this article. The system's structural elasticity is considered in deriving the system's dynamics. The devised controller is robust against the induced flexibilities, while an inherent adaptation scheme allows for the control of asymmetrical configurations and the transportation of unknown payloads. Certain optimization metrics are introduced for solving the individual agent thrust allocation problem while achieving maximum system flight time, resulting in a platform-independent control implementation. Experimental studies are offered to illustrate the efficiency of the suggested controller under typical flight conditions, increased rod elasticities and payload transportation.