 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Noisy Optimisation with the Sliding Window Compact Genetic Algorithm
Aug 07, 2017
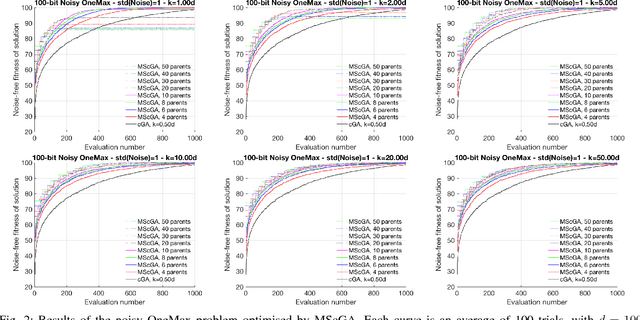

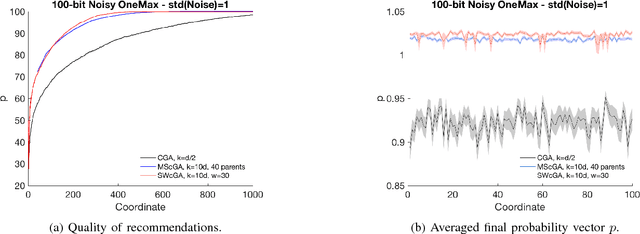
The compact genetic algorithm is an Estimation of Distribution Algorithm for binary optimisation problems. Unlike the standard Genetic Algorithm, no cross-over or mutation is involved. Instead, the compact Genetic Algorithm uses a virtual population represented as a probability distribution over the set of binary strings. At each optimisation iteration, exactly two individuals are generated by sampling from the distribution, and compared exactly once to determine a winner and a loser. The probability distribution is then adjusted to increase the likelihood of generating individuals similar to the winner. This paper introduces two straightforward variations of the compact Genetic Algorithm, each of which lead to a significant improvement in performance. The main idea is to make better use of each fitness evaluation, by ensuring that each evaluated individual is used in multiple win/loss comparisons. The first variation is to sample $n>2$ individuals at each iteration to make $n(n-1)/2$ comparisons. The second variation only samples one individual at each iteration but keeps a sliding history window of previous individuals to compare with. We evaluate methods on two noisy test problems and show that in each case they significantly outperform the compact Genetic Algorithm, while maintaining the simplicity of the algorithm.
Evaluating Noisy Optimisation Algorithms: First Hitting Time is Problematic
Jul 12, 2017
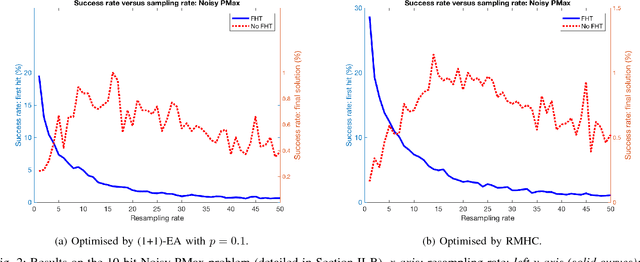
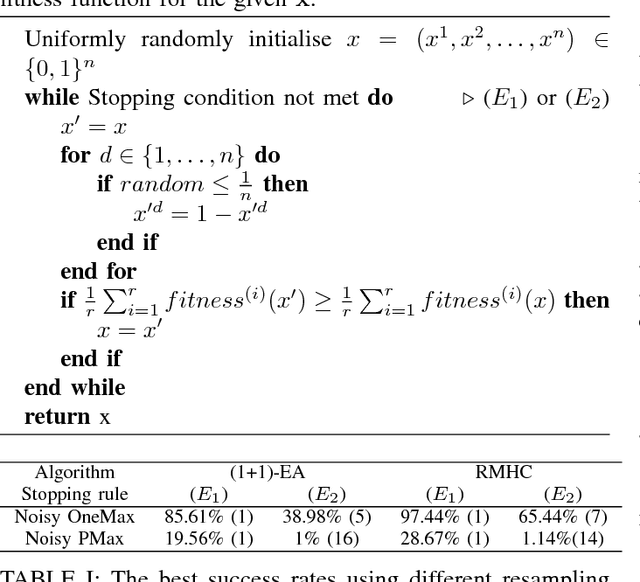
A key part of any evolutionary algorithm is fitness evaluation. When fitness evaluations are corrupted by noise, as happens in many real-world problems as a consequence of various types of uncertainty, a strategy is needed in order to cope with this. Resampling is one of the most common strategies, whereby each solution is evaluated many times in order to reduce the variance of the fitness estimates. When evaluating the performance of a noisy optimisation algorithm, a key consideration is the stopping condition for the algorithm. A frequently used stopping condition in runtime analysis, known as "First Hitting Time", is to stop the algorithm as soon as it encounters the optimal solution. However, this is unrealistic for real-world problems, as if the optimal solution were already known, there would be no need to search for it. This paper argues that the use of First Hitting Time, despite being a commonly used approach, is significantly flawed and overestimates the quality of many algorithms in real-world cases, where the optimum is not known in advance and has to be genuinely searched for. A better alternative is to measure the quality of the solution an algorithm returns after a fixed evaluation budget, i.e., to focus on final solution quality. This paper argues that focussing on final solution quality is more realistic and demonstrates cases where the results produced by each algorithm evaluation method lead to very different conclusions regarding the quality of each noisy optimisation algorithm.
Optimal resampling for the noisy OneMax problem
Jun 12, 2017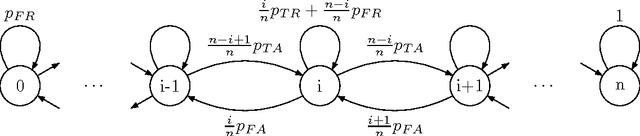
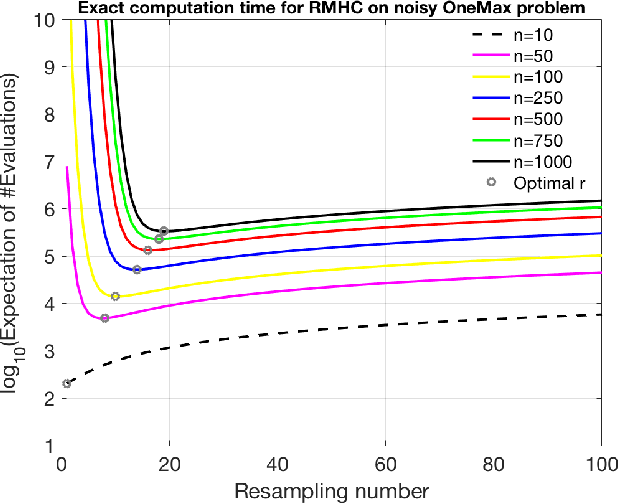
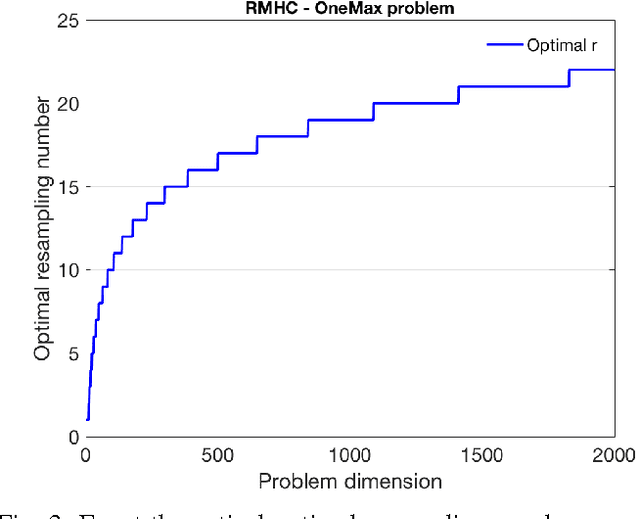
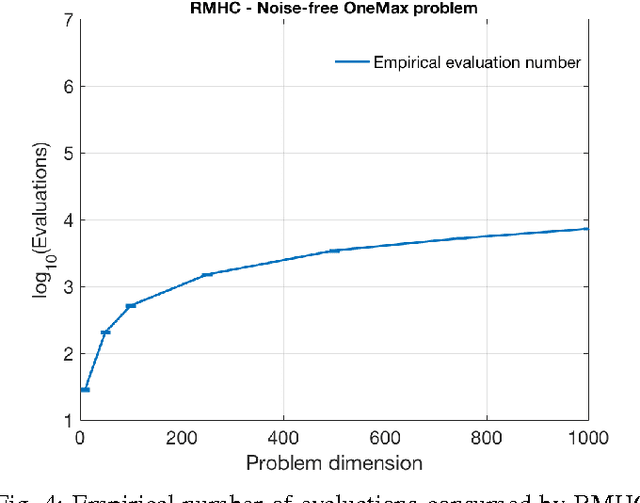
The OneMax problem is a standard benchmark optimisation problem for a binary search space. Recent work on applying a Bandit-Based Random Mutation Hill-Climbing algorithm to the noisy OneMax Problem showed that it is important to choose a good value for the resampling number to make a careful trade off between taking more samples in order to reduce noise, and taking fewer samples to reduce the total computational cost. This paper extends that observation, by deriving an analytical expression for the running time of the RMHC algorithm with resampling applied to the noisy OneMax problem, and showing both theoretically and empirically that the optimal resampling number increases with the number of dimensions in the search space.
Rolling Horizon Coevolutionary Planning for Two-Player Video Games
Jul 06, 2016


This paper describes a new algorithm for decision making in two-player real-time video games. As with Monte Carlo Tree Search, the algorithm can be used without heuristics and has been developed for use in general video game AI. The approach is to extend recent work on rolling horizon evolutionary planning, which has been shown to work well for single-player games, to two (or in principle many) player games. To select an action the algorithm co-evolves two (or in the general case N) populations, one for each player, where each individual is a sequence of actions for the respective player. The fitness of each individual is evaluated by playing it against a selection of action-sequences from the opposing population. When choosing an action to take in the game, the first action is chosen from the fittest member of the population for that player. The new algorithm is compared with a number of general video game AI algorithms on three variations of a two-player space battle game, with promising results.