 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCritical concrete scenario generation using scenario-based falsification
Aug 29, 2022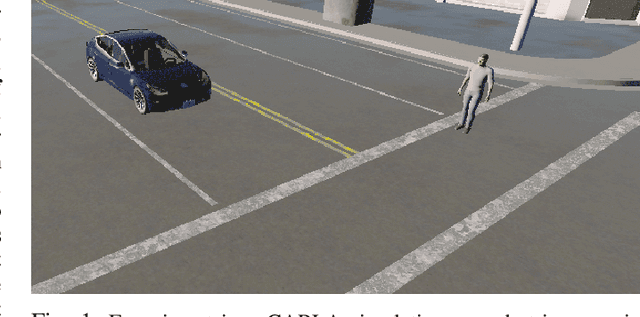

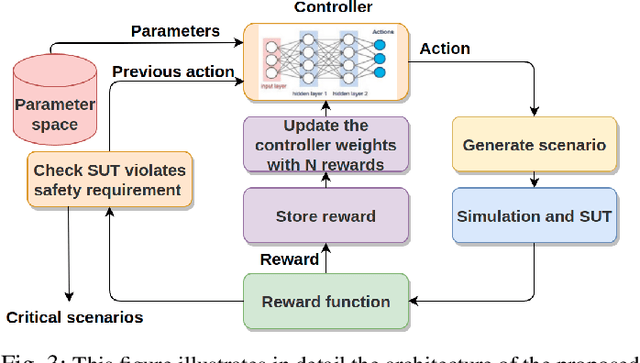

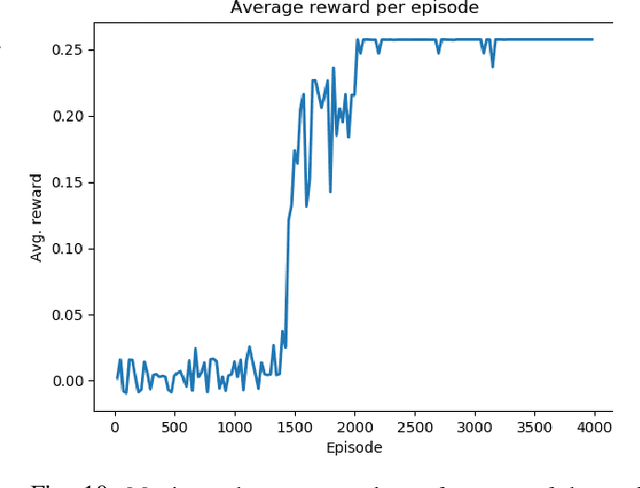
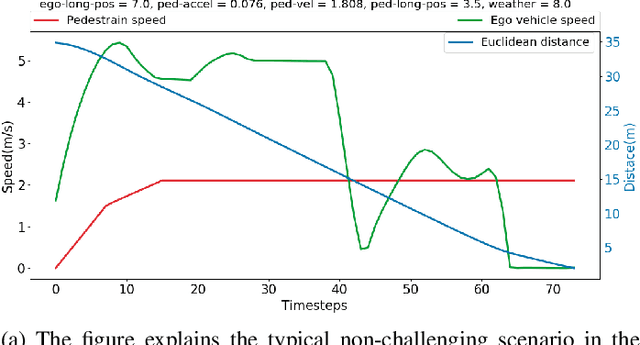
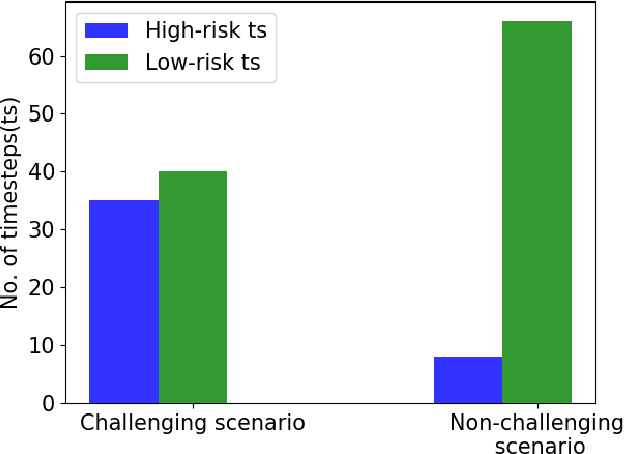
Autonomous vehicles have the potential to lower the accident rate when compared to human driving. Moreover, it is the driving force of the automated vehicles' rapid development over the last few years. In the higher Society of Automotive Engineers (SAE) automation level, the vehicle's and passengers' safety responsibility is transferred from the driver to the automated system, so thoroughly validating such a system is essential. Recently, academia and industry have embraced scenario-based evaluation as the complementary approach to road testing, reducing the overall testing effort required. It is essential to determine the system's flaws before deploying it on public roads as there is no safety driver to guarantee the reliability of such a system. This paper proposes a Reinforcement Learning (RL) based scenario-based falsification method to search for a high-risk scenario in a pedestrian crossing traffic situation. We define a scenario as risky when a system under testing (SUT) does not satisfy the requirement. The reward function for our RL approach is based on Intel's Responsibility Sensitive Safety(RSS), Euclidean distance, and distance to a potential collision.
Parameterisation of lane-change scenarios from real-world data
Jun 20, 2022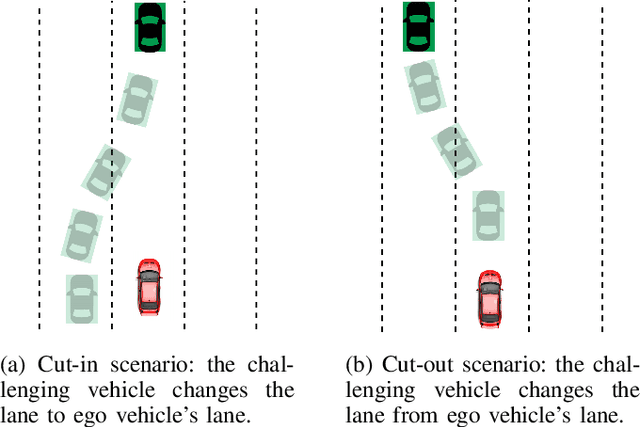


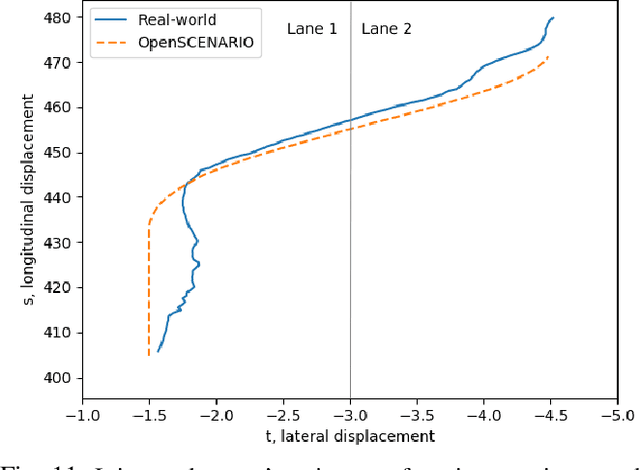
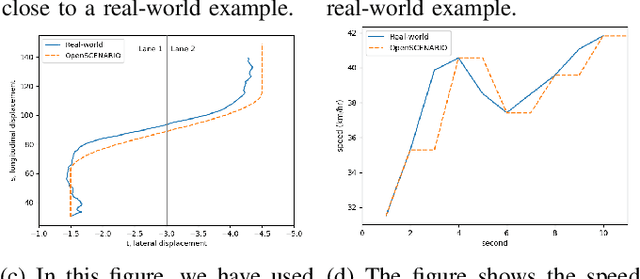
Recent Autonomous Vehicles (AV) technology includes machine learning and probabilistic techniques that add significant complexity to the traditional verification and validation methods. The research community and industry have widely accepted scenario-based testing in the last few years. As it is focused directly on the relevant crucial road situations, it can reduce the effort required in testing. Encoding real-world traffic participants' behaviour is essential to efficiently assess the System Under Test (SUT) in scenario-based testing. So, it is necessary to capture the scenario parameters from the real-world data that can model scenarios realistically in simulation. The primary emphasis of the paper is to identify the list of meaningful parameters that adequately model real-world lane-change scenarios. With these parameters, it is possible to build a parameter space capable of generating a range of challenging scenarios for AV testing efficiently. We validate our approach using Root Mean Square Error(RMSE) to compare the scenarios generated using the proposed parameters against the real-world trajectory data. In addition to that, we demonstrate that adding a slight disturbance to a few scenario parameters can generate different scenarios and utilise Responsibility-Sensitive Safety (RSS) metric to measure the scenarios' risk.
Automatic lane change scenario extraction and generation of scenarios in OpenX format from real-world data
Mar 14, 2022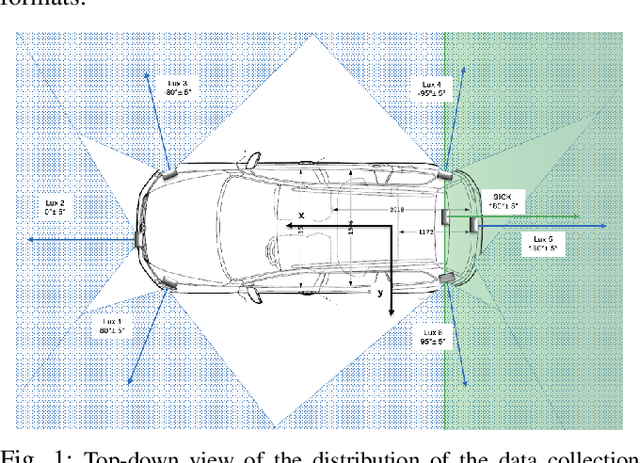

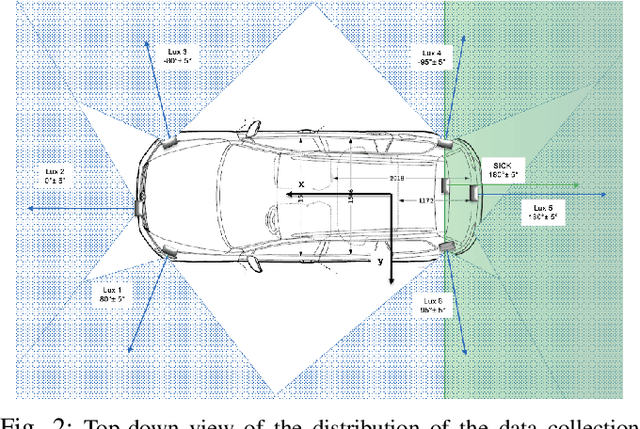
Autonomous Vehicles (AV)'s wide-scale deployment appears imminent despite many safety challenges yet to be resolved. The modern autonomous vehicles will undoubtedly include machine learning and probabilistic techniques that add significant complexity to the traditional verification and validation methods. Road testing is essential before the deployment, but scenarios are repeatable, and it's hard to collect challenging events. Exploring numerous, diverse and crucial scenarios is a time-consuming and expensive approach. The research community and industry have widely accepted scenario-based testing in the last few years. As it is focused directly on the relevant critical road situations, it can reduce the effort required in testing. The scenario-based testing in simulation requires the realistic behaviour of the traffic participants to assess the System Under Test (SUT). It is essential to capture the scenarios from the real world to encode the behaviour of actual traffic participants. This paper proposes a novel scenario extraction method to capture the lane change scenarios using point-cloud data and object tracking information. This method enables fully automatic scenario extraction compared to similar approaches in this area. The generated scenarios are represented in OpenX format to reuse them in the SUT evaluation easily. The motivation of this framework is to build a validation dataset to generate many critical concrete scenarios. The code is available online at https://github.com/dkarunakaran/scenario_extraction_framework.
Efficient falsification approach for autonomous vehicle validation using a parameter optimisation technique based on reinforcement learning
Nov 16, 2020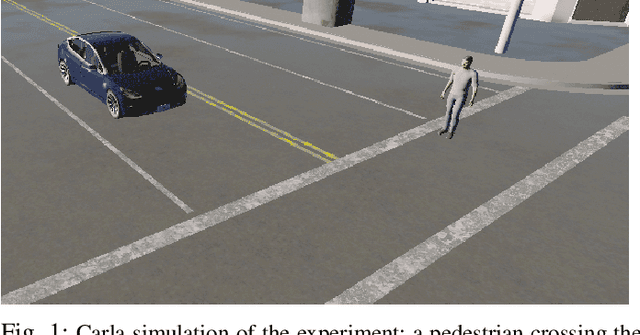
The widescale deployment of Autonomous Vehicles (AV) appears to be imminent despite many safety challenges that are yet to be resolved. It is well-known that there are no universally agreed Verification and Validation (VV) methodologies guarantee absolute safety, which is crucial for the acceptance of this technology. The uncertainties in the behaviour of the traffic participants and the dynamic world cause stochastic reactions in advanced autonomous systems. The addition of ML algorithms and probabilistic techniques adds significant complexity to the process for real-world testing when compared to traditional methods. Most research in this area focuses on generating challenging concrete scenarios or test cases to evaluate the system performance by looking at the frequency distribution of extracted parameters as collected from the real-world data. These approaches generally employ Monte-Carlo simulation and importance sampling to generate critical cases. This paper presents an efficient falsification method to evaluate the System Under Test. The approach is based on a parameter optimisation problem to search for challenging scenarios. The optimisation process aims at finding the challenging case that has maximum return. The method applies policy-gradient reinforcement learning algorithm to enable the learning. The riskiness of the scenario is measured by the well established RSS safety metric, euclidean distance, and instance of a collision. We demonstrate that by using the proposed method, we can more efficiently search for challenging scenarios which could cause the system to fail in order to satisfy the safety requirements.
Efficient statistical validation with edge cases to evaluate Highly Automated Vehicles
Mar 04, 2020

The widescale deployment of Autonomous Vehicles (AV) seems to be imminent despite many safety challenges that are yet to be resolved. It is well known that there are no universally agreed Verification and Validation (VV) methodologies to guarantee absolute safety, which is crucial for the acceptance of this technology. Existing standards focus on deterministic processes where the validation requires only a set of test cases that cover the requirements. Modern autonomous vehicles will undoubtedly include machine learning and probabilistic techniques that require a much more comprehensive testing regime due to the non-deterministic nature of the operating design domain. A rigourous statistical validation process is an essential component required to address this challenge. Most research in this area focuses on evaluating system performance in large scale real-world data gathering exercises (number of miles travelled), or randomised test scenarios in simulation. This paper presents a new approach to compute the statistical characteristics of a system's behaviour by biasing automatically generated test cases towards the worst case scenarios, identifying potential unsafe edge cases.We use reinforcement learning (RL) to learn the behaviours of simulated actors that cause unsafe behaviour measured by the well established RSS safety metric. We demonstrate that by using the method we can more efficiently validate a system using a smaller number of test cases by focusing the simulation towards the worst case scenario, generating edge cases that correspond to unsafe situations.