 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrative Analysis and Imputation of Multiple Data Streams via Deep Gaussian Processes
May 17, 2025


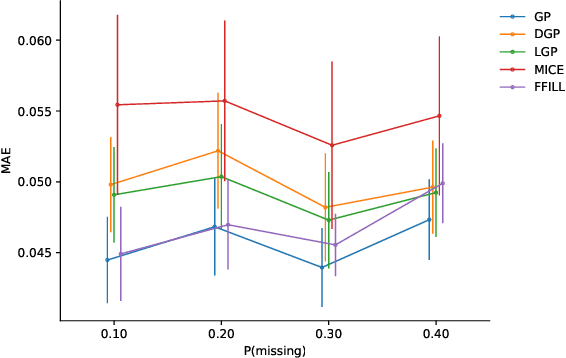
Healthcare data, particularly in critical care settings, presents three key challenges for analysis. First, physiological measurements come from different sources but are inherently related. Yet, traditional methods often treat each measurement type independently, losing valuable information about their relationships. Second, clinical measurements are collected at irregular intervals, and these sampling times can carry clinical meaning. Finally, the prevalence of missing values. Whilst several imputation methods exist to tackle this common problem, they often fail to address the temporal nature of the data or provide estimates of uncertainty in their predictions. We propose using deep Gaussian process emulation with stochastic imputation, a methodology initially conceived to deal with computationally expensive models and uncertainty quantification, to solve the problem of handling missing values that naturally occur in critical care data. This method leverages longitudinal and cross-sectional information and provides uncertainty estimation for the imputed values. Our evaluation of a clinical dataset shows that the proposed method performs better than conventional methods, such as multiple imputations with chained equations (MICE), last-known value imputation, and individually fitted Gaussian Processes (GPs).
Linked Deep Gaussian Process Emulation for Model Networks
Jun 02, 2023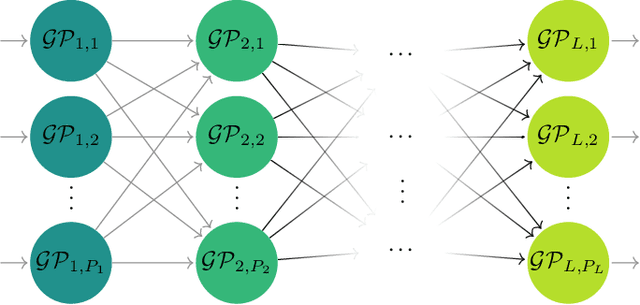
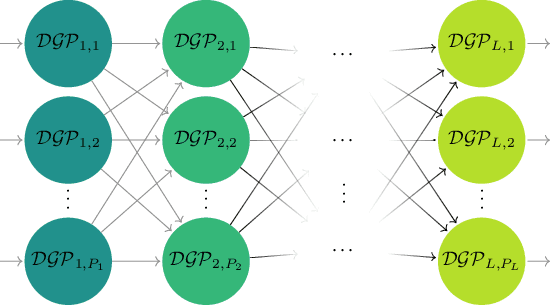

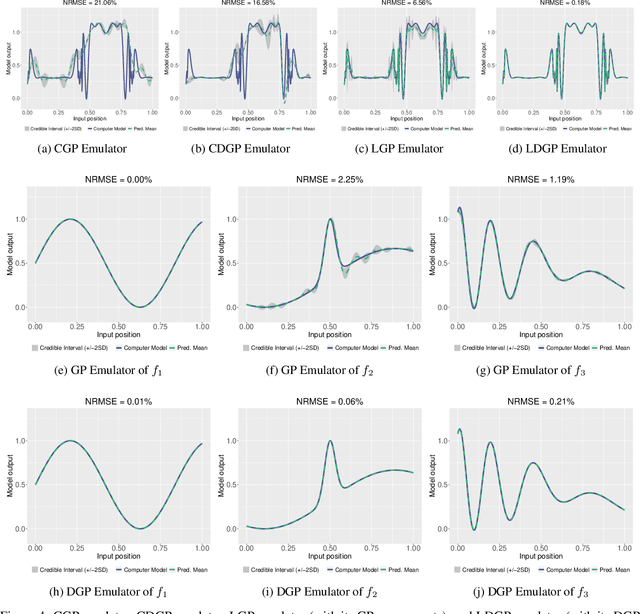
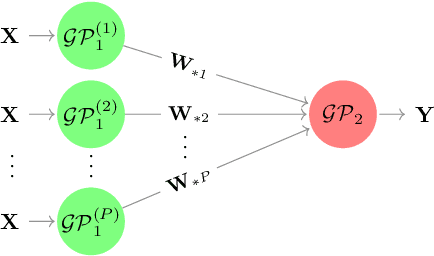
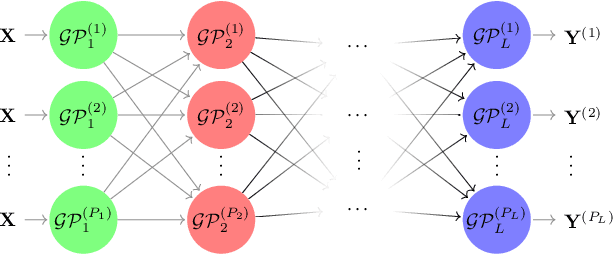
Modern scientific problems are often multi-disciplinary and require integration of computer models from different disciplines, each with distinct functional complexities, programming environments, and computation times. Linked Gaussian process (LGP) emulation tackles this challenge through a divide-and-conquer strategy that integrates Gaussian process emulators of the individual computer models in a network. However, the required stationarity of the component Gaussian process emulators within the LGP framework limits its applicability in many real-world applications. In this work, we conceptualize a network of computer models as a deep Gaussian process with partial exposure of its hidden layers. We develop a method for inference for these partially exposed deep networks that retains a key strength of the LGP framework, whereby each model can be emulated separately using a DGP and then linked together. We show in both synthetic and empirical examples that our linked deep Gaussian process emulators exhibit significantly better predictive performance than standard LGP emulators in terms of accuracy and uncertainty quantification. They also outperform single DGPs fitted to the network as a whole because they are able to integrate information from the partially exposed hidden layers. Our methods are implemented in an R package $\texttt{dgpsi}$ that is freely available on CRAN.
Deep Gaussian Process Emulation using Stochastic Imputation
Jul 04, 2021

We propose a novel deep Gaussian process (DGP) inference method for computer model emulation using stochastic imputation. By stochastically imputing the latent layers, the approach transforms the DGP into the linked GP, a state-of-the-art surrogate model formed by linking a system of feed-forward coupled GPs. This transformation renders a simple while efficient DGP training procedure that only involves optimizations of conventional stationary GPs. In addition, the analytically tractable mean and variance of the linked GP allows one to implement predictions from DGP emulators in a fast and accurate manner. We demonstrate the method in a series of synthetic examples and real-world applications, and show that it is a competitive candidate for efficient DGP surrogate modeling in comparison to the variational inference and the fully-Bayesian approach. A $\texttt{Python}$ package $\texttt{dgpsi}$ implementing the method is also produced and available at https://github.com/mingdeyu/DGP.