 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparison of Model-Free and Model Predictive Control for Price Responsive Water Heaters
Nov 08, 2021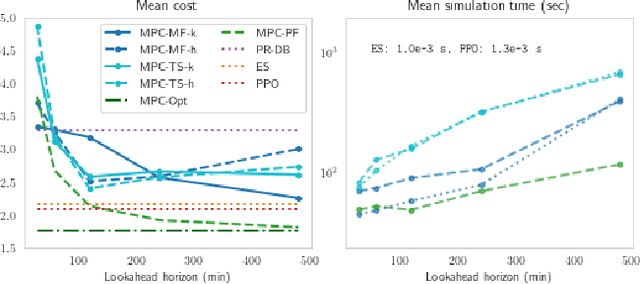
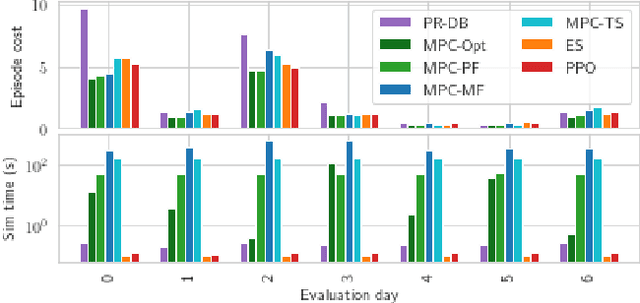
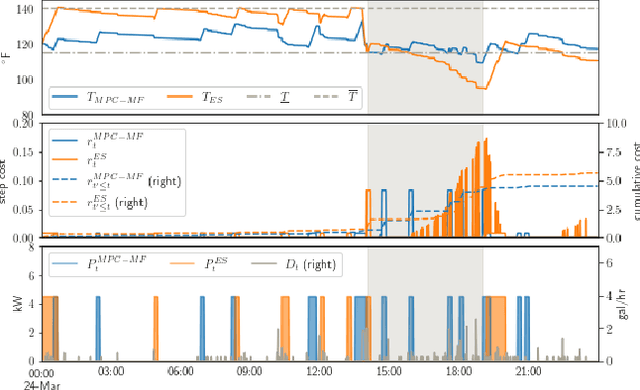
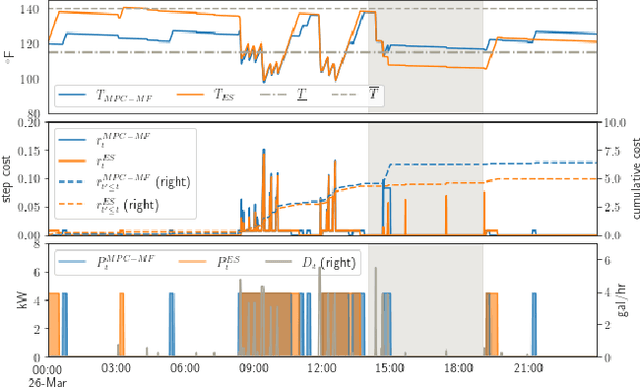
We present a careful comparison of two model-free control algorithms, Evolution Strategies (ES) and Proximal Policy Optimization (PPO), with receding horizon model predictive control (MPC) for operating simulated, price responsive water heaters. Four MPC variants are considered: a one-shot controller with perfect forecasting yielding optimal control; a limited-horizon controller with perfect forecasting; a mean forecasting-based controller; and a two-stage stochastic programming controller using historical scenarios. In all cases, the MPC model for water temperature and electricity price are exact; only water demand is uncertain. For comparison, both ES and PPO learn neural network-based policies by directly interacting with the simulated environment under the same scenarios used by MPC. All methods are then evaluated on a separate one-week continuation of the demand time series. We demonstrate that optimal control for this problem is challenging, requiring more than 8-hour lookahead for MPC with perfect forecasting to attain the minimum cost. Despite this challenge, both ES and PPO learn good general purpose policies that outperform mean forecast and two-stage stochastic MPC controllers in terms of average cost and are more than two orders of magnitude faster at computing actions. We show that ES in particular can leverage parallelism to learn a policy in under 90 seconds using 1150 CPU cores.
* All authors are with the Computational Science Center at the National Renewable Energy Laboratory. Corresponding author: David Biagioni (dave.biagioni@nrel.gov)