 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen Horizons: Evaluating Deep Models in the Wild
Dec 13, 2025Open-world deployment requires models to recognize both known categories and remain reliable when novel classes appear. We present a unified experimental study spanning open-set recognition (OSR) and few-shot class-incremental learning (FSCIL) on CIFAR-10. For OSR, we compare three pretrained frozen visual encoders: ResNet-50, ConvNeXt-Tiny and CLIP ViT-B/16,using a linear probe and four post-hoc scoring functions, namely MSP, Energy, Mahalanobis and kNN. Across metrics,such as, AUROC, AUPR, FPR@95, and OSCR, CLIP consistently yields the strongest separability between known and unknown samples, with Energy providing the most stable performance across backbones. For FSCIL, we compare modified SPPR, OrCo, and ConCM using partially frozen ResNet-50 across 1-, 5-, and 10-shot scenarios. ConCM achieves 84.7% accuracy in the 10-shot setting with the cleanest confusion matrix, while all methods show saturation beyond 5 shots. Our controlled evaluation reveals how the backbone architecture and scoring mechanisms affect unknown detection and how prototype-based methods mitigate catastrophic forgetting during incremental adaptation.
A Gis Aided Approach for Geolocalizing an Unmanned Aerial System Using Deep Learning
Aug 25, 2022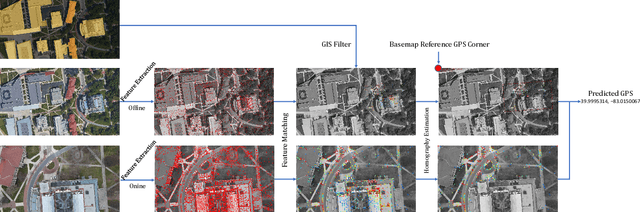
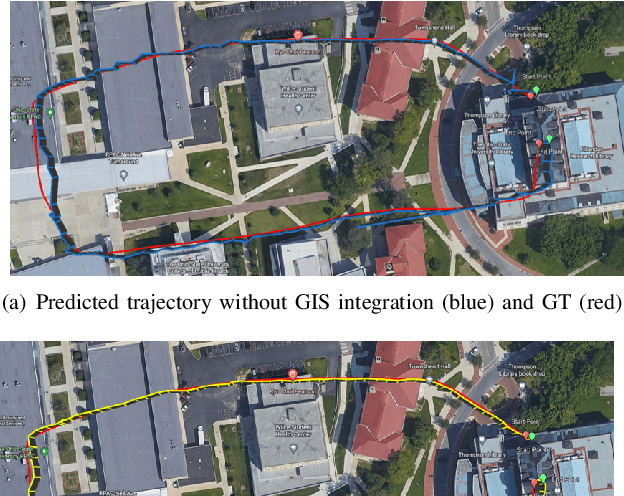
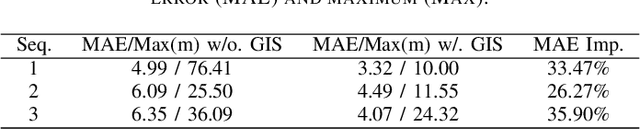
The Global Positioning System (GPS) has become a part of our daily life with the primary goal of providing geopositioning service. For an unmanned aerial system (UAS), geolocalization ability is an extremely important necessity which is achieved using Inertial Navigation System (INS) with the GPS at its heart. Without geopositioning service, UAS is unable to fly to its destination or come back home. Unfortunately, GPS signals can be jammed and suffer from a multipath problem in urban canyons. Our goal is to propose an alternative approach to geolocalize a UAS when GPS signal is degraded or denied. Considering UAS has a downward-looking camera on its platform that can acquire real-time images as the platform flies, we apply modern deep learning techniques to achieve geolocalization. In particular, we perform image matching to establish latent feature conjugates between UAS acquired imagery and satellite orthophotos. A typical application of feature matching suffers from high-rise buildings and new constructions in the field that introduce uncertainties into homography estimation, hence results in poor geolocalization performance. Instead, we extract GIS information from OpenStreetMap (OSM) to semantically segment matched features into building and terrain classes. The GIS mask works as a filter in selecting semantically matched features that enhance coplanarity conditions and the UAS geolocalization accuracy. Once the paper is published our code will be publicly available at https://github.com/OSUPCVLab/UbihereDrone2021.