 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Gis Aided Approach for Geolocalizing an Unmanned Aerial System Using Deep Learning
Paper and Code
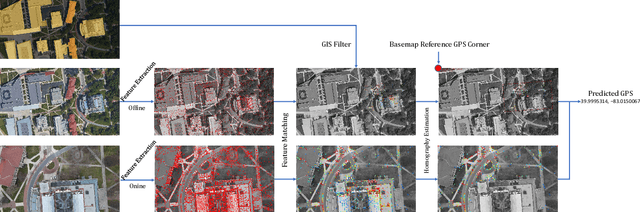
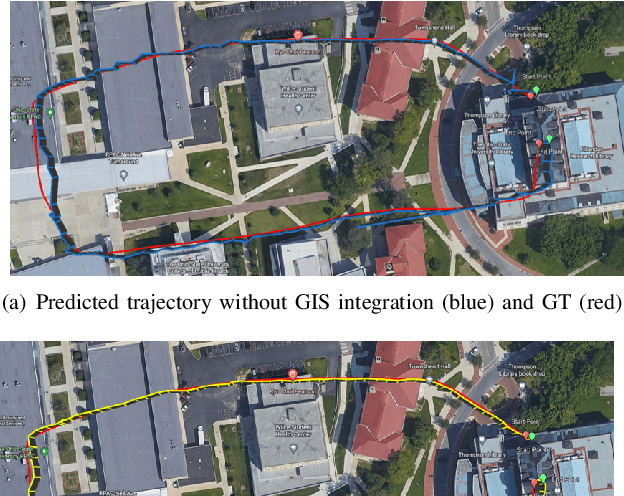
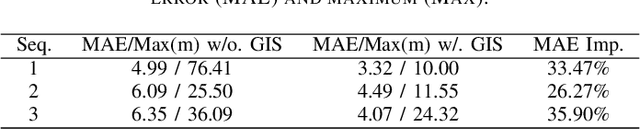
The Global Positioning System (GPS) has become a part of our daily life with the primary goal of providing geopositioning service. For an unmanned aerial system (UAS), geolocalization ability is an extremely important necessity which is achieved using Inertial Navigation System (INS) with the GPS at its heart. Without geopositioning service, UAS is unable to fly to its destination or come back home. Unfortunately, GPS signals can be jammed and suffer from a multipath problem in urban canyons. Our goal is to propose an alternative approach to geolocalize a UAS when GPS signal is degraded or denied. Considering UAS has a downward-looking camera on its platform that can acquire real-time images as the platform flies, we apply modern deep learning techniques to achieve geolocalization. In particular, we perform image matching to establish latent feature conjugates between UAS acquired imagery and satellite orthophotos. A typical application of feature matching suffers from high-rise buildings and new constructions in the field that introduce uncertainties into homography estimation, hence results in poor geolocalization performance. Instead, we extract GIS information from OpenStreetMap (OSM) to semantically segment matched features into building and terrain classes. The GIS mask works as a filter in selecting semantically matched features that enhance coplanarity conditions and the UAS geolocalization accuracy. Once the paper is published our code will be publicly available at https://github.com/OSUPCVLab/UbihereDrone2021.