 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePAC-Bayes Generalisation Bounds for Dynamical Systems Including Stable RNNs
Dec 15, 2023

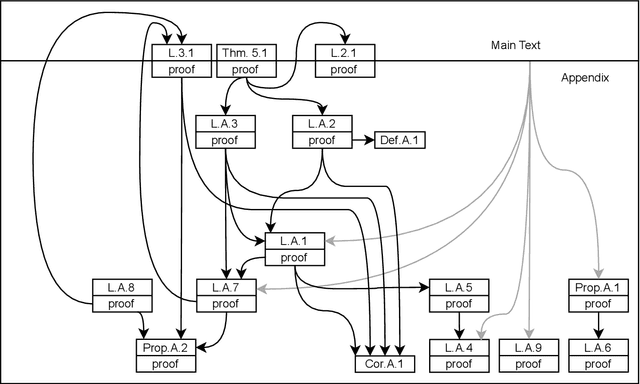
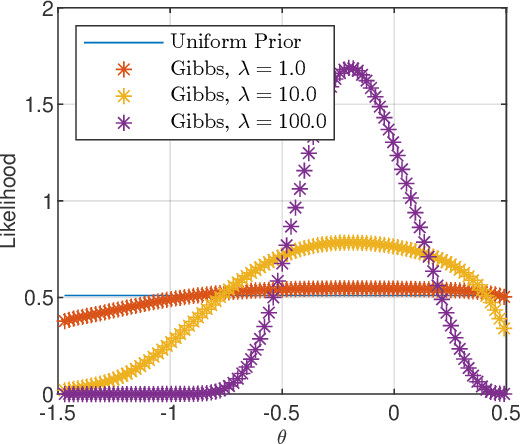
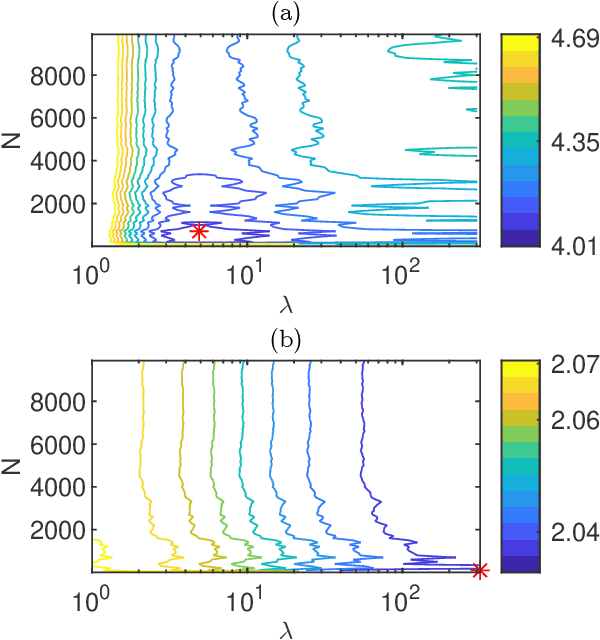
In this paper, we derive a PAC-Bayes bound on the generalisation gap, in a supervised time-series setting for a special class of discrete-time non-linear dynamical systems. This class includes stable recurrent neural networks (RNN), and the motivation for this work was its application to RNNs. In order to achieve the results, we impose some stability constraints, on the allowed models. Here, stability is understood in the sense of dynamical systems. For RNNs, these stability conditions can be expressed in terms of conditions on the weights. We assume the processes involved are essentially bounded and the loss functions are Lipschitz. The proposed bound on the generalisation gap depends on the mixing coefficient of the data distribution, and the essential supremum of the data. Furthermore, the bound converges to zero as the dataset size increases. In this paper, we 1) formalize the learning problem, 2) derive a PAC-Bayesian error bound for such systems, 3) discuss various consequences of this error bound, and 4) show an illustrative example, with discussions on computing the proposed bound. Unlike other available bounds the derived bound holds for non i.i.d. data (time-series) and it does not grow with the number of steps of the RNN.
PAC-Bayesian bounds for learning LTI-ss systems with input from empirical loss
Mar 29, 2023
In this paper we derive a Probably Approxilmately Correct(PAC)-Bayesian error bound for linear time-invariant (LTI) stochastic dynamical systems with inputs. Such bounds are widespread in machine learning, and they are useful for characterizing the predictive power of models learned from finitely many data points. In particular, with the bound derived in this paper relates future average prediction errors with the prediction error generated by the model on the data used for learning. In turn, this allows us to provide finite-sample error bounds for a wide class of learning/system identification algorithms. Furthermore, as LTI systems are a sub-class of recurrent neural networks (RNNs), these error bounds could be a first step towards PAC-Bayesian bounds for RNNs.
PAC-Bayesian-Like Error Bound for a Class of Linear Time-Invariant Stochastic State-Space Models
Dec 30, 2022In this paper we derive a PAC-Bayesian-Like error bound for a class of stochastic dynamical systems with inputs, namely, for linear time-invariant stochastic state-space models (stochastic LTI systems for short). This class of systems is widely used in control engineering and econometrics, in particular, they represent a special case of recurrent neural networks. In this paper we 1) formalize the learning problem for stochastic LTI systems with inputs, 2) derive a PAC-Bayesian-Like error bound for such systems, 3) discuss various consequences of this error bound.
Optimal Prediction of Unmeasured Output from Measurable Outputs In LTI Systems
Sep 06, 2021
In this short article, we showcase the derivation of an optimal predictor, when one part of system's output is not measured but is able to be predicted from the rest of the system's output which is measured. According to author's knowledge, similar derivations have been done before but not in state-space representation.
PAC-Bayesian theory for stochastic LTI systems
Mar 25, 2021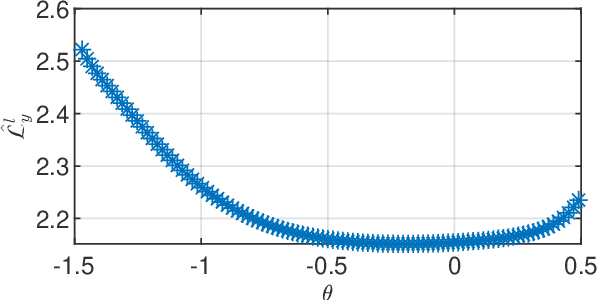
In this paper we derive a PAC-Bayesian error bound for autonomous stochastic LTI state-space models. The motivation for deriving such error bounds is that they will allow deriving similar error bounds for more general dynamical systems, including recurrent neural networks. In turn, PACBayesian error bounds are known to be useful for analyzing machine learning algorithms and for deriving new ones.