 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Point Clouds: A Knowledge-Aided High Resolution Imaging Radar Deep Detector for Autonomous Driving
Nov 01, 2021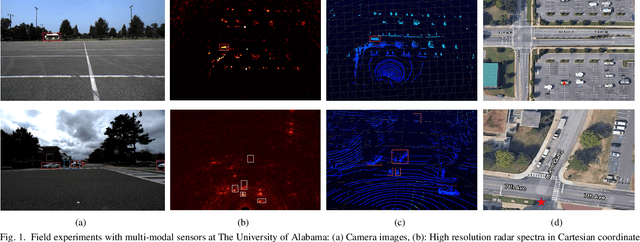
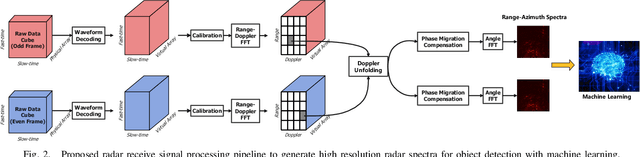
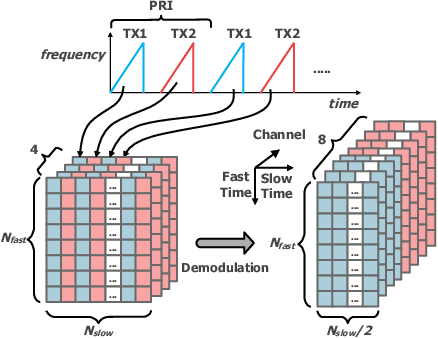
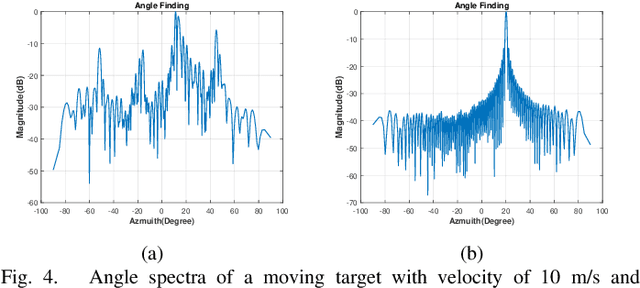
The potentials of automotive radar for autonomous driving have not been fully exploited. We present a multi-input multi-output (MIMO) radar transmit and receive signal processing chain, a knowledge-aided approach exploiting the radar domain knowledge and signal structure, to generate high resolution radar range-azimuth spectra for object detection and classification using deep neural networks. To achieve waveform orthogonality among a large number of transmit antennas cascaded by four automotive radar transceivers, we propose a staggered time division multiplexing (TDM) scheme and velocity unfolding algorithm using both Chinese remainder theorem and overlapped array. Field experiments with multi-modal sensors were conducted at The University of Alabama. High resolution radar spectra were obtained and labeled using the camera and LiDAR recordings. Initial experiments show promising performance of object detection using an image-oriented deep neural network with an average precision of 96.1% at an intersection of union (IoU) of typically 0.5 on 2,000 radar frames.