 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvariants for Homology Classes with Application to Optimal Search and Planning Problem in Robotics
Aug 02, 2012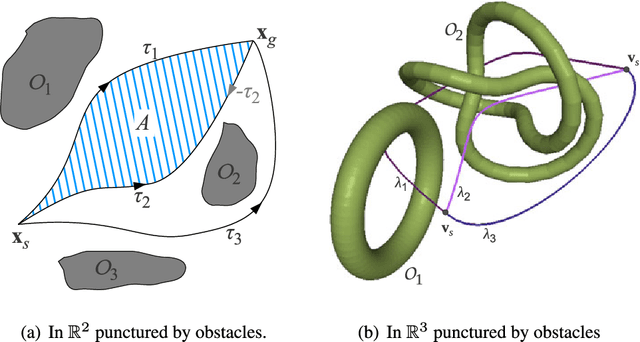

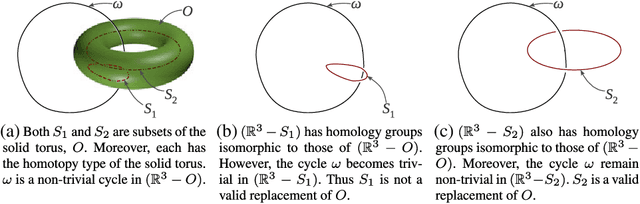
We consider planning problems on a punctured Euclidean spaces, $\mathbb{R}^D - \widetilde{\mathcal{O}}$, where $\widetilde{\mathcal{O}}$ is a collection of obstacles. Such spaces are of frequent occurrence as configuration spaces of robots, where $\widetilde{\mathcal{O}}$ represent either physical obstacles that the robots need to avoid (e.g., walls, other robots, etc.) or illegal states (e.g., all legs off-the-ground). As state-planning is translated to path-planning on a configuration space, we collate equivalent plannings via topologically-equivalent paths. This prompts finding or exploring the different homology classes in such environments and finding representative optimal trajectories in each such class. In this paper we start by considering the problem of finding a complete set of easily computable homology class invariants for $(N-1)$-cycles in $(\mathbb{R}^D - \widetilde{\mathcal{O}})$. We achieve this by finding explicit generators of the $(N-1)^{st}$ de Rham cohomology group of this punctured Euclidean space, and using their integrals to define cocycles. The action of those dual cocycles on $(N-1)$-cycles gives the desired complete set of invariants. We illustrate the computation through examples. We further show that, due to the integral approach, this complete set of invariants is well-suited for efficient search-based planning of optimal robot trajectories with topological constraints. Finally we extend this approach to computation of invariants in spaces derived from $(\mathbb{R}^D - \widetilde{\mathcal{O}})$ by collapsing subspace, thereby permitting application to a wider class of non-Euclidean ambient spaces.