 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConservation Tools: The Next Generation of Engineering--Biology Collaborations
Jan 03, 2023



The recent increase in public and academic interest in preserving biodiversity has led to the growth of the field of conservation technology. This field involves designing and constructing tools that utilize technology to aid in the conservation of wildlife. In this article, we will use case studies to demonstrate the importance of designing conservation tools with human-wildlife interaction in mind and provide a framework for creating successful tools. These case studies include a range of complexities, from simple cat collars to machine learning and game theory methodologies. Our goal is to introduce and inform current and future researchers in the field of conservation technology and provide references for educating the next generation of conservation technologists. Conservation technology not only has the potential to benefit biodiversity but also has broader impacts on fields such as sustainability and environmental protection. By using innovative technologies to address conservation challenges, we can find more effective and efficient solutions to protect and preserve our planet's resources.
Batch-Augmented Multi-Agent Reinforcement Learning for Efficient Traffic Signal Optimization
May 19, 2020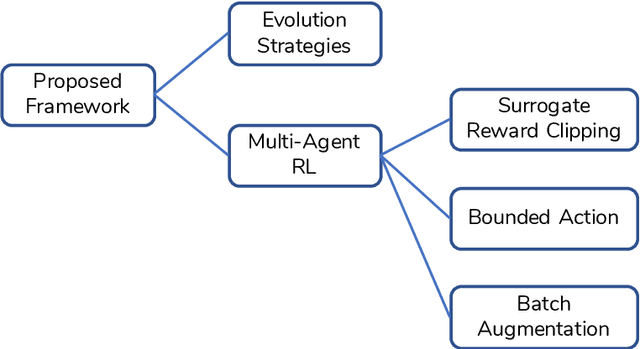
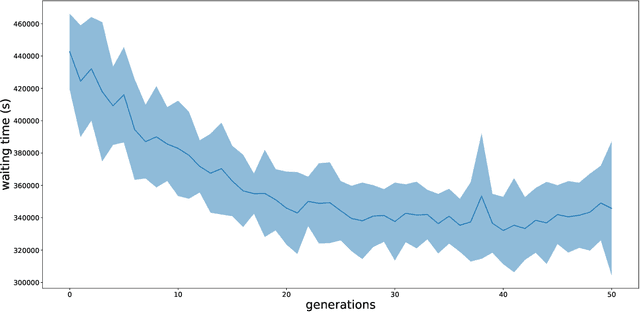
The goal of this work is to provide a viable solution based on reinforcement learning for traffic signal control problems. Although the state-of-the-art reinforcement learning approaches have yielded great success in a variety of domains, directly applying it to alleviate traffic congestion can be challenging, considering the requirement of high sample efficiency and how training data is gathered. In this work, we address several challenges that we encountered when we attempted to mitigate serious traffic congestion occurring in a metropolitan area. Specifically, we are required to provide a solution that is able to (1) handle the traffic signal control when certain surveillance cameras that retrieve information for reinforcement learning are down, (2) learn from batch data without a traffic simulator, and (3) make control decisions without shared information across intersections. We present a two-stage framework to deal with the above-mentioned situations. The framework can be decomposed into an Evolution Strategies approach that gives a fixed-time traffic signal control schedule and a multi-agent off-policy reinforcement learning that is capable of learning from batch data with the aid of three proposed components, bounded action, batch augmentation, and surrogate reward clipping. Our experiments show that the proposed framework reduces traffic congestion by 36% in terms of waiting time compared with the currently used fixed-time traffic signal plan. Furthermore, the framework requires only 600 queries to a simulator to achieve the result.