 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDivide and Conquer Networks
Oct 14, 2018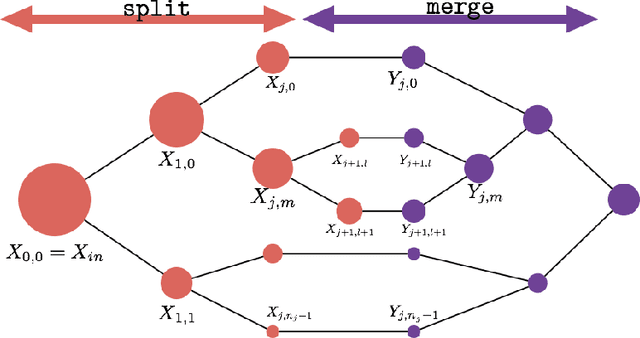
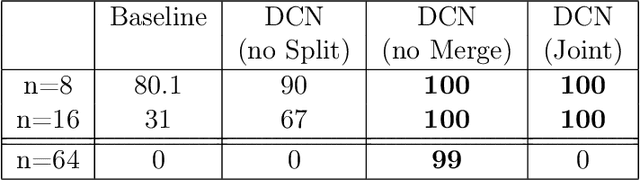
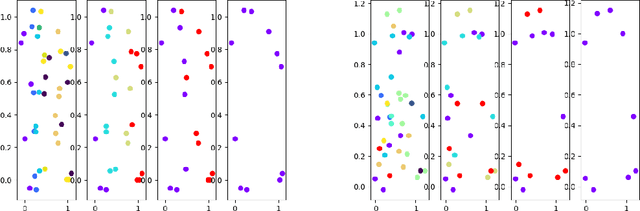
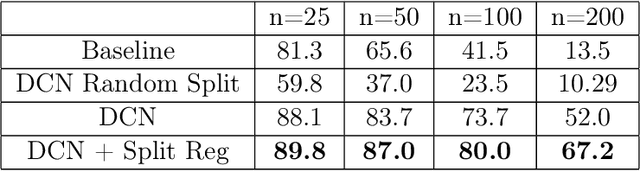
We consider the learning of algorithmic tasks by mere observation of input-output pairs. Rather than studying this as a black-box discrete regression problem with no assumption whatsoever on the input-output mapping, we concentrate on tasks that are amenable to the principle of divide and conquer, and study what are its implications in terms of learning. This principle creates a powerful inductive bias that we leverage with neural architectures that are defined recursively and dynamically, by learning two scale-invariant atomic operations: how to split a given input into smaller sets, and how to merge two partially solved tasks into a larger partial solution. Our model can be trained in weakly supervised environments, namely by just observing input-output pairs, and in even weaker environments, using a non-differentiable reward signal. Moreover, thanks to the dynamic aspect of our architecture, we can incorporate the computational complexity as a regularization term that can be optimized by backpropagation. We demonstrate the flexibility and efficiency of the Divide-and-Conquer Network on several combinatorial and geometric tasks: convex hull, clustering, knapsack and euclidean TSP. Thanks to the dynamic programming nature of our model, we show significant improvements in terms of generalization error and computational complexity.
Planning with Arithmetic and Geometric Attributes
Sep 06, 2018



A desirable property of an intelligent agent is its ability to understand its environment to quickly generalize to novel tasks and compose simpler tasks into more complex ones. If the environment has geometric or arithmetic structure, the agent should exploit these for faster generalization. Building on recent work that augments the environment with user-specified attributes, we show that further equipping these attributes with the appropriate geometric and arithmetic structure brings substantial gains in sample complexity.