 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Verification Methodology for Safety Assurance of Robotic Autonomous Systems
Jun 24, 2025Autonomous robots deployed in shared human environments, such as agricultural settings, require rigorous safety assurance to meet both functional reliability and regulatory compliance. These systems must operate in dynamic, unstructured environments, interact safely with humans, and respond effectively to a wide range of potential hazards. This paper presents a verification workflow for the safety assurance of an autonomous agricultural robot, covering the entire development life-cycle, from concept study and design to runtime verification. The outlined methodology begins with a systematic hazard analysis and risk assessment to identify potential risks and derive corresponding safety requirements. A formal model of the safety controller is then developed to capture its behaviour and verify that the controller satisfies the specified safety properties with respect to these requirements. The proposed approach is demonstrated on a field robot operating in an agricultural setting. The results show that the methodology can be effectively used to verify safety-critical properties and facilitate the early identification of design issues, contributing to the development of safer robots and autonomous systems.
Probabilistic modelling and safety assurance of an agriculture robot providing light-treatment
Jun 24, 2025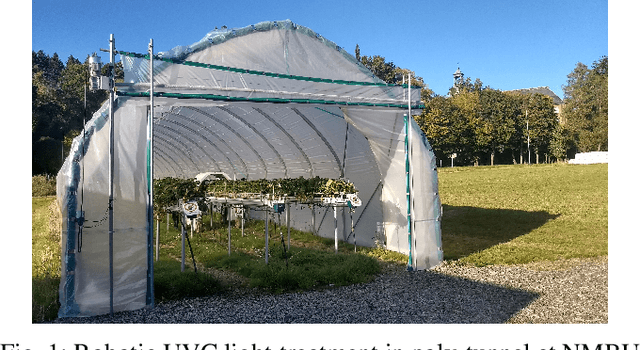
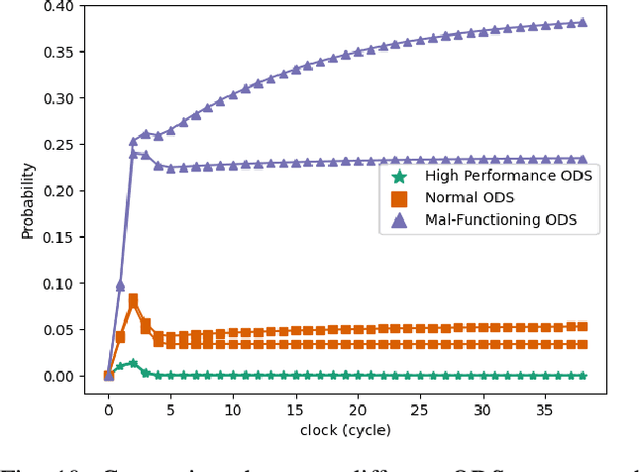
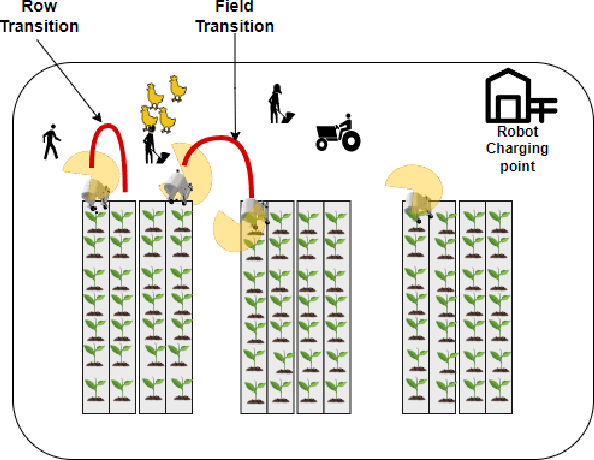
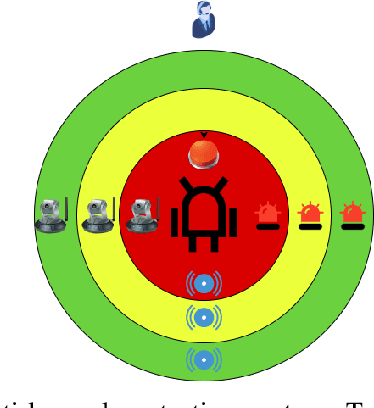
Continued adoption of agricultural robots postulates the farmer's trust in the reliability, robustness and safety of the new technology. This motivates our work on safety assurance of agricultural robots, particularly their ability to detect, track and avoid obstacles and humans. This paper considers a probabilistic modelling and risk analysis framework for use in the early development phases. Starting off with hazard identification and a risk assessment matrix, the behaviour of the mobile robot platform, sensor and perception system, and any humans present are captured using three state machines. An auto-generated probabilistic model is then solved and analysed using the probabilistic model checker PRISM. The result provides unique insight into fundamental development and engineering aspects by quantifying the effect of the risk mitigation actions and risk reduction associated with distinct design concepts. These include implications of adopting a higher performance and more expensive Object Detection System or opting for a more elaborate warning system to increase human awareness. Although this paper mainly focuses on the initial concept-development phase, the proposed safety assurance framework can also be used during implementation, and subsequent deployment and operation phases.
Model Checking and Verification of Synchronisation Properties of Cobot Welding
Nov 21, 2024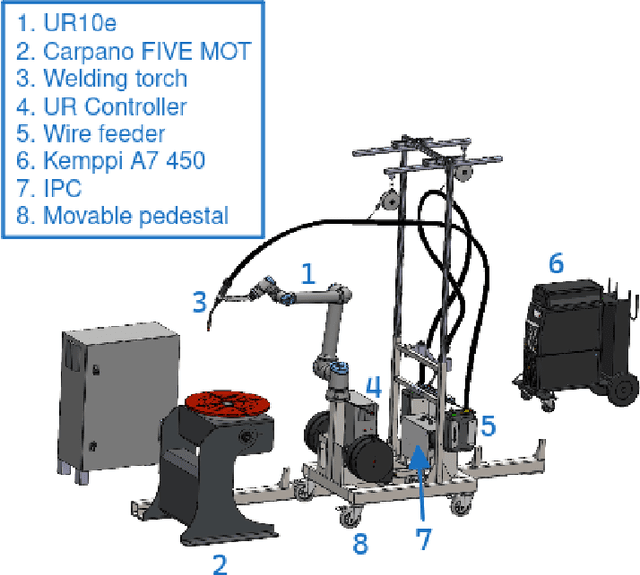
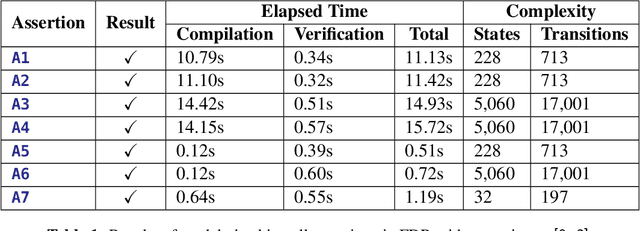

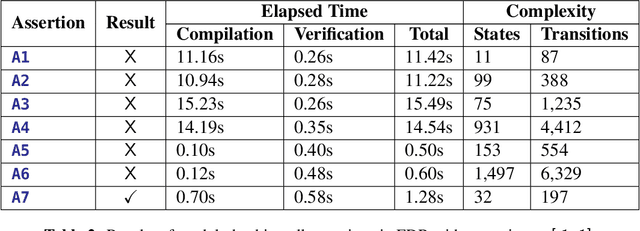
This paper describes use of model checking to verify synchronisation properties of an industrial welding system consisting of a cobot arm and an external turntable. The robots must move synchronously, but sometimes get out of synchronisation, giving rise to unsatisfactory weld qualities in problem areas, such as around corners. These mistakes are costly, since time is lost both in the robotic welding and in manual repairs needed to improve the weld. Verification of the synchronisation properties has shown that they are fulfilled as long as assumptions of correctness made about parts outside the scope of the model hold, indicating limitations in the hardware. These results have indicated the source of the problem, and motivated a re-calibration of the real-life system. This has drastically improved the welding results, and is a demonstration of how formal methods can be useful in an industrial setting.
* In Proceedings FMAS2024, arXiv:2411.13215
Safety assurance of an industrial robotic control system using hardware/software co-verification
Dec 27, 2021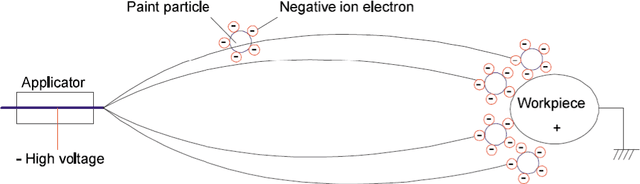
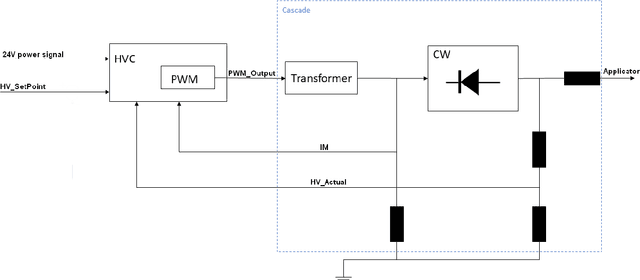

As a general trend in industrial robotics, an increasing number of safety functions are being developed or re-engineered to be handled in software rather than by physical hardware such as safety relays or interlock circuits. This trend reinforces the importance of supplementing traditional, input-based testing and quality procedures which are widely used in industry today, with formal verification and model-checking methods. To this end, this paper focuses on a representative safety-critical system in an ABB industrial paint robot, namely the High-Voltage electrostatic Control system (HVC). The practical convergence of the high-voltage produced by the HVC, essential for safe operation, is formally verified using a novel and general co-verification framework where hardware and software models are related via platform mappings. This approach enables the pragmatic combination of highly diverse and specialised tools. The paper's main contribution includes details on how hardware abstraction and verification results can be transferred between tools in order to verify system-level safety properties. It is noteworthy that the HVC application considered in this paper has a rather generic form of a feedback controller. Hence, the co-verification framework and experiences reported here are also highly relevant for any cyber-physical system tracking a setpoint reference.