 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTwo-Leg Deep Space Relay Architectures: Performance, Challenges, and Perspectives
May 27, 2022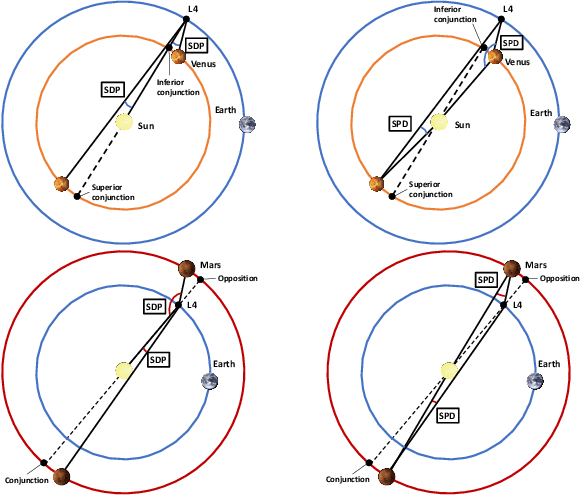
In this paper, architectures for interplanetary communications that feature the use of a data relay are investigated. In the considered "two-leg" architecture, a spacecraft orbiting the Earth, or in orbit at a Lagrange point, receives data from a deep space probe (leg-1) and relays them towards ground (leg-2). Different wireless technologies for the interplanetary link, namely, radio frequencies above the Ka band and optical frequencies, are considered. Moreover, the cases of transparent and regenerative relaying as well as different different orbital configurations are addressed, offering a thorough analysis of such systems from different viewpoints. Results show that, under certain constraints in terms of pointing accuracy and onboard antenna size, the adoption of a two-leg architecture can achieve the data rates supported by direct space-to-Earth link configurations with remarkably smaller ground station antennas.
Deep Learning for Real Time Satellite Pose Estimation on Low Power Edge TPU
Apr 07, 2022
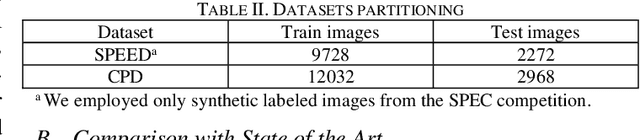
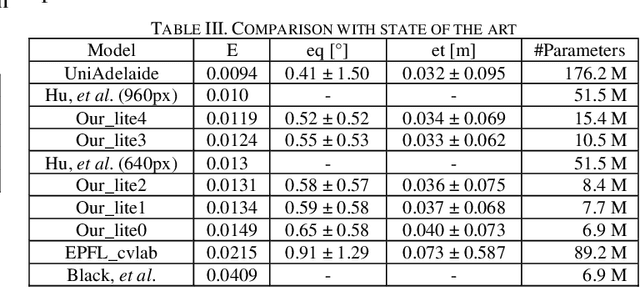
Pose estimation of an uncooperative space resident object is a key asset towards autonomy in close proximity operations. In this context monocular cameras are a valuable solution because of their low system requirements. However, the associated image processing algorithms are either too computationally expensive for real time on-board implementation, or not enough accurate. In this paper we propose a pose estimation software exploiting neural network architectures which can be scaled to different accuracy-latency trade-offs. We designed our pipeline to be compatible with Edge Tensor Processing Units to show how low power machine learning accelerators could enable Artificial Intelligence exploitation in space. The neural networks were tested both on the benchmark Spacecraft Pose Estimation Dataset, and on the purposely developed Cosmo Photorealistic Dataset, which depicts a COSMO-SkyMed satellite in a variety of random poses and steerable solar panels orientations. The lightest version of our architecture achieves state-of-the-art accuracy on both datasets but at a fraction of networks complexity, running at 7.7 frames per second on a Coral Dev Board Mini consuming just 2.2W.