 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicle-Human Interactive Behaviors in Emergency: Data Extraction from Traffic Accident Videos
Mar 02, 2020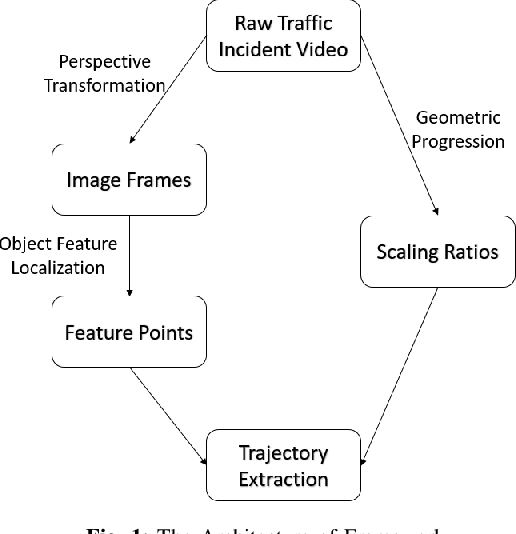


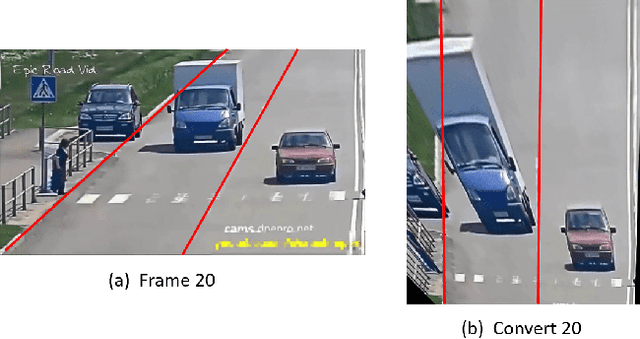
Currently, studying the vehicle-human interactive behavior in the emergency needs a large amount of datasets in the actual emergent situations that are almost unavailable. Existing public data sources on autonomous vehicles (AVs) mainly focus either on the normal driving scenarios or on emergency situations without human involvement. To fill this gap and facilitate related research, this paper provides a new yet convenient way to extract the interactive behavior data (i.e., the trajectories of vehicles and humans) from actual accident videos that were captured by both the surveillance cameras and driving recorders. The main challenge for data extraction from real-time accident video lies in the fact that the recording cameras are un-calibrated and the angles of surveillance are unknown. The approach proposed in this paper employs image processing to obtain a new perspective which is different from the original video's perspective. Meanwhile, we manually detect and mark object feature points in each image frame. In order to acquire a gradient of reference ratios, a geometric model is implemented in the analysis of reference pixel value, and the feature points are then scaled to the object trajectory based on the gradient of ratios. The generated trajectories not only restore the object movements completely but also reflect changes in vehicle velocity and rotation based on the feature points distributions.