 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparative Analysis of Multi-Agent Reinforcement Learning Policies for Crop Planning Decision Support
Dec 03, 2024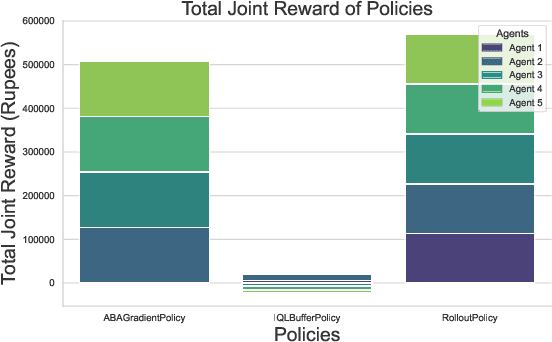
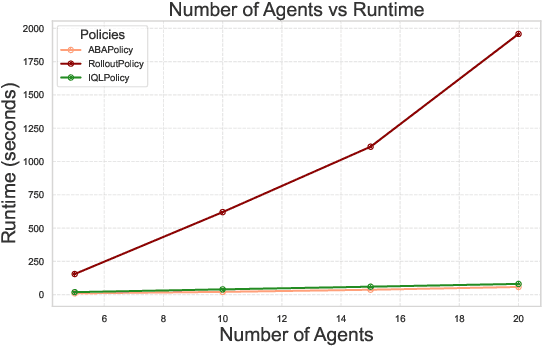
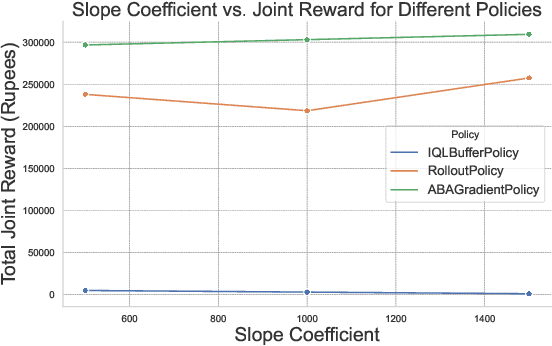
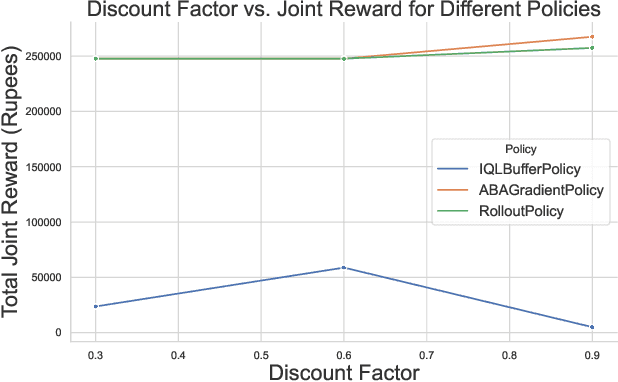
In India, the majority of farmers are classified as small or marginal, making their livelihoods particularly vulnerable to economic losses due to market saturation and climate risks. Effective crop planning can significantly impact their expected income, yet existing decision support systems (DSS) often provide generic recommendations that fail to account for real-time market dynamics and the interactions among multiple farmers. In this paper, we evaluate the viability of three multi-agent reinforcement learning (MARL) approaches for optimizing total farmer income and promoting fairness in crop planning: Independent Q-Learning (IQL), where each farmer acts independently without coordination, Agent-by-Agent (ABA), which sequentially optimizes each farmer's policy in relation to the others, and the Multi-agent Rollout Policy, which jointly optimizes all farmers' actions for global reward maximization. Our results demonstrate that while IQL offers computational efficiency with linear runtime, it struggles with coordination among agents, leading to lower total rewards and an unequal distribution of income. Conversely, the Multi-agent Rollout policy achieves the highest total rewards and promotes equitable income distribution among farmers but requires significantly more computational resources, making it less practical for large numbers of agents. ABA strikes a balance between runtime efficiency and reward optimization, offering reasonable total rewards with acceptable fairness and scalability. These findings highlight the importance of selecting appropriate MARL approaches in DSS to provide personalized and equitable crop planning recommendations, advancing the development of more adaptive and farmer-centric agricultural decision-making systems.
CE-MRS: Contrastive Explanations for Multi-Robot Systems
Oct 10, 2024



As the complexity of multi-robot systems grows to incorporate a greater number of robots, more complex tasks, and longer time horizons, the solutions to such problems often become too complex to be fully intelligible to human users. In this work, we introduce an approach for generating natural language explanations that justify the validity of the system's solution to the user, or else aid the user in correcting any errors that led to a suboptimal system solution. Toward this goal, we first contribute a generalizable formalism of contrastive explanations for multi-robot systems, and then introduce a holistic approach to generating contrastive explanations for multi-robot scenarios that selectively incorporates data from multi-robot task allocation, scheduling, and motion-planning to explain system behavior. Through user studies with human operators we demonstrate that our integrated contrastive explanation approach leads to significant improvements in user ability to identify and solve system errors, leading to significant improvements in overall multi-robot team performance.
* Accepted to IEEE Robotics and Automation Letters