 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath continuity for multi-wheeled AGVs
Mar 02, 2021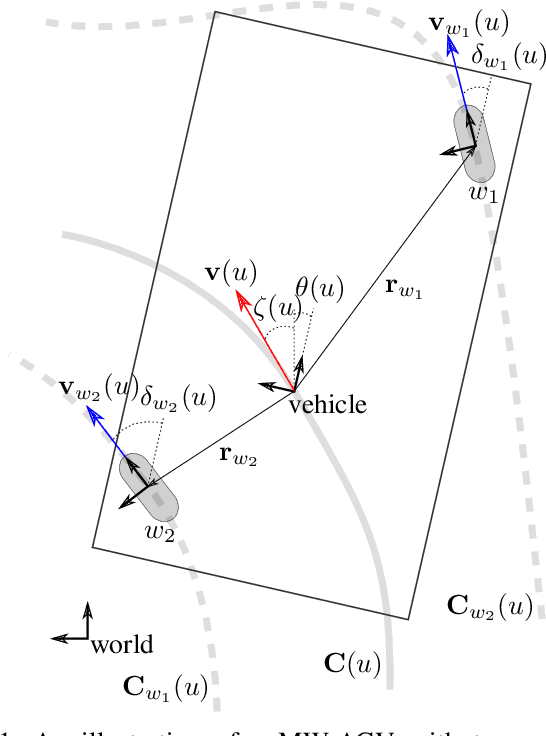
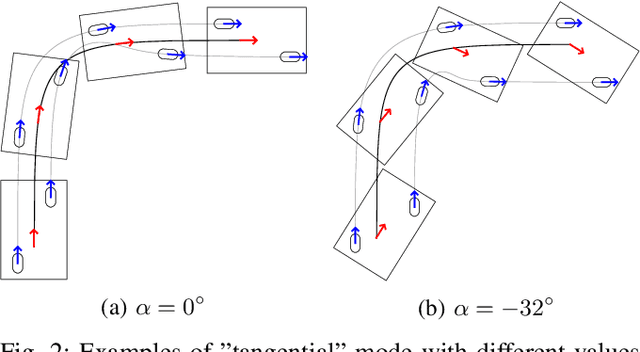
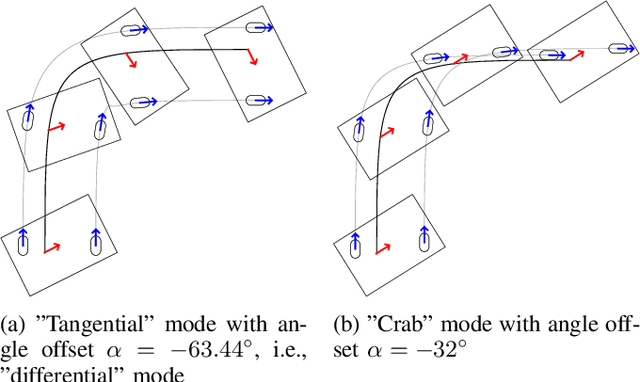
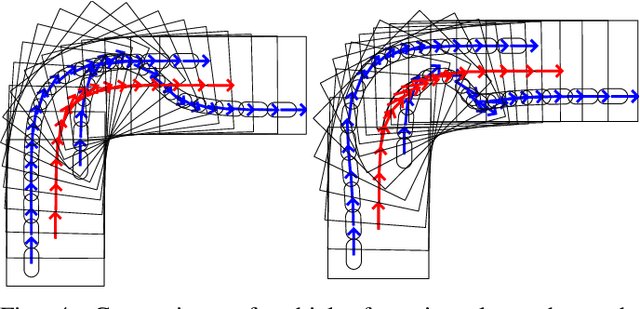
Notwithstanding the growing presence of AGVs in the industry, there is a lack of research about multi-wheeled AGVs which offer higher maneuverability and space efficiency. In this paper, we present generalized path continuity conditions as a continuation of previous research done for vehicles with more constrained kinematic capabilities. We propose a novel approach for analytically defining various kinematic modes (motion modes), that AGVs with multiple steer and drive wheels can utilize. This approach enables deriving vehicle kinematic equations based on the vehicle configuration and its constraints, path shape, and corresponding motion mode. Finally, we derive general continuity conditions for paths that multi-wheeled AGVs can follow, and show through examples how they can be utilized in layout design methods.
Efficient Dense Frontier Detection for 2D Graph SLAM Based on Occupancy Grid Submaps
Feb 28, 2019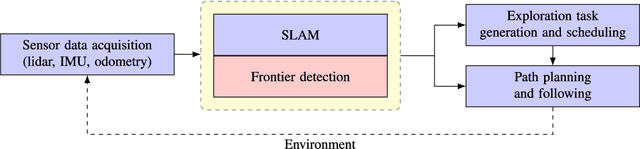
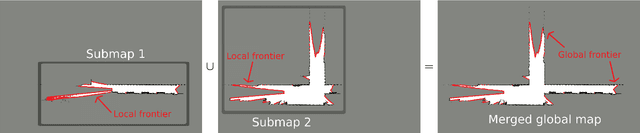
In autonomous robot exploration, the frontier is the border in the world map between the explored space and unexplored space. The frontier plays an important role when deciding where in the environment the robots should go explore next. We examine a modular control system pipeline for autonomous exploration where a 2D graph SLAM algorithm based on occupancy grid submaps performs map building and localization. We provide an overview of the state of the art in frontier detection and the relevant SLAM concepts and propose a specialized frontier detection method which is efficiently constrained to active submaps, yet robust to SLAM loop closures.