Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Dense Frontier Detection for 2D Graph SLAM Based on Occupancy Grid Submaps
Feb 28, 2019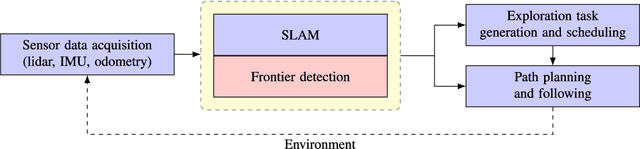
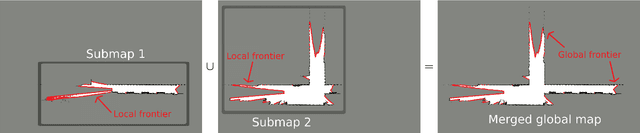
In autonomous robot exploration, the frontier is the border in the world map between the explored space and unexplored space. The frontier plays an important role when deciding where in the environment the robots should go explore next. We examine a modular control system pipeline for autonomous exploration where a 2D graph SLAM algorithm based on occupancy grid submaps performs map building and localization. We provide an overview of the state of the art in frontier detection and the relevant SLAM concepts and propose a specialized frontier detection method which is efficiently constrained to active submaps, yet robust to SLAM loop closures.
* Undergoing review in IEEE RA-L
Via