 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstrained Prioritized 3T2R Task Control for Robotic Agricultural Spraying
Jul 01, 2023



In this paper, we present a solution for robot arm-controlled agricultural spraying, handling the spraying task as a constrained prioritized 3T2R task. 3T2R tasks in robot manipulation consist of three translational and two rotational degrees of freedom, and are frequently used when the end-effector is axis-symmetric. The solution presented in this paper introduces a prioritization between the translational and rotational degrees of freedom of the 3T2R task, and we discuss the utility of this kind of approach for both velocity and positional inverse kinematics, which relate to continuous and selective agricultural spraying applications respectively.
Efficient Dense Frontier Detection for 2D Graph SLAM Based on Occupancy Grid Submaps
Feb 28, 2019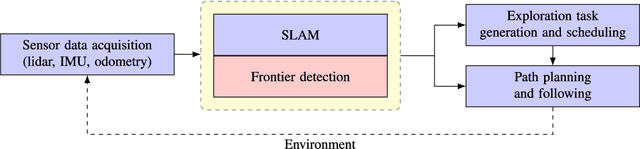
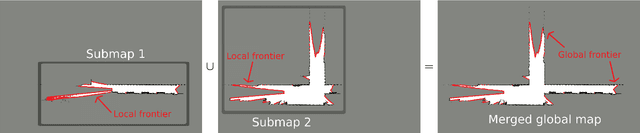
In autonomous robot exploration, the frontier is the border in the world map between the explored space and unexplored space. The frontier plays an important role when deciding where in the environment the robots should go explore next. We examine a modular control system pipeline for autonomous exploration where a 2D graph SLAM algorithm based on occupancy grid submaps performs map building and localization. We provide an overview of the state of the art in frontier detection and the relevant SLAM concepts and propose a specialized frontier detection method which is efficiently constrained to active submaps, yet robust to SLAM loop closures.