 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Beacon Based Solution for Autonomous UUVs GNSS-Denied Stealthy Navigation
Jan 22, 2026Autonomous Unmanned Underwater Vehicles (UUVs) enable military and civilian covert operations in coastal areas without relying on support vessels or Global Navigation Satellite Systems (GNSS). Such operations are critical when surface access is not possible and stealthy navigation is required in restricted environments such as protected zones or dangerous areas under access ban. GNSS denied navigation is then essential to maintaining concealment as surfacing could expose UUVs to detection. To ensure a precise fleet positioning a constellation of beacons deployed by aerial or surface drones establish a synthetic landmark network that will guide the fleet of UUVs along an optimized path from the continental shelf to the goal on the shore. These beacons either submerged or floating emit acoustic signals for UUV localisation and navigation. A hierarchical planner generates an adaptive route for the drones executing primitive actions while continuously monitoring and replanning as needed to maintain trajectory accuracy.
GAIPAT -Dataset on Human Gaze and Actions for Intent Prediction in Assembly Tasks
Mar 14, 2025



The primary objective of the dataset is to provide a better understanding of the coupling between human actions and gaze in a shared working environment with a cobot, with the aim of signifcantly enhancing the effciency and safety of humancobot interactions. More broadly, by linking gaze patterns with physical actions, the dataset offers valuable insights into cognitive processes and attention dynamics in the context of assembly tasks. The proposed dataset contains gaze and action data from approximately 80 participants, recorded during simulated industrial assembly tasks. The tasks were simulated using controlled scenarios in which participants manipulated educational building blocks. Gaze data was collected using two different eye-tracking setups -head-mounted and remote-while participants worked in two positions: sitting and standing.
Human-Cobot collaboration's impact on success, time completion, errors, workload, gestures and acceptability during an assembly task
May 28, 2024The 5.0 industry promotes collaborative robots (cobots). This research studies the impacts of cobot collaboration using an experimental setup. 120 participants realized a simple and a complex assembly task. 50% collaborated with another human (H/H) and 50% with a cobot (H/C). The workload and the acceptability of the cobotic collaboration were measured. Working with a cobot decreases the effect of the task complexity on the human workload and on the output quality. However, it increases the time completion and the number of gestures (while decreasing their frequency). The H/C couples have a higher chance of success but they take more time and more gestures to realize the task. The results of this research could help developers and stakeholders to understand the impacts of implementing a cobot in production chains.
Assessing MSDs before Introduction of a Cobot: Psychosocial Aspects and Employee's Subjective Experience
Jul 13, 2023



Musculoskeletal disorders (MSDs) are one of the main causes of work disability (EU-OSHA, 2019; WHO, 2019). Several solutions, including the cobotic system (EUROGIP, 2017), have been put forward to improve unhealthy working conditions and prevent MSDs. We sought to identify the MSD risk factors of workers on a screen-printed glass production line prior to introduction of a cobot. We used a mixed data collection technique: video observations and assessment of MSD risk factors by expert ergonomists, and then self-confrontation interviews with six production-line operators and subjective perception of risk factors. The two types of assessment (by experts and by operators) showed that the most demanding risk factors were physical (e.g., work posture) and psychosocial (e.g., mental workload). Certain risk factors were viewed differently by the experts and the operators. One question remains: How can a cobot make work more meaningful for operators?
On Guiding Search in HTN Temporal Planning with non Temporal Heuristics
Jun 13, 2023


The Hierarchical Task Network (HTN) formalism is used to express a wide variety of planning problems as task decompositions, and many techniques have been proposed to solve them. However, few works have been done on temporal HTN. This is partly due to the lack of a formal and consensual definition of what a temporal hierarchical planning problem is as well as the difficulty to develop heuristics in this context. In response to these inconveniences, we propose in this paper a new general POCL (Partial Order Causal Link) approach to represent and solve a temporal HTN problem by using existing heuristics developed to solve non temporal problems. We show experimentally that this approach is performant and can outperform the existing ones.
HDDL 2.1: Towards Defining a Formalism and a Semantics for Temporal HTN Planning
Jun 12, 2023
Real world applications as in industry and robotics need modelling rich and diverse automated planning problems. Their resolution usually requires coordinated and concurrent action execution. In several cases, these problems are naturally decomposed in a hierarchical way and expressed by a Hierarchical Task Network (HTN) formalism. HDDL, a hierarchical extension of the Planning Domain Definition Language (PDDL), unlike PDDL 2.1 does not allow to represent planning problems with numerical and temporal constraints, which are essential for real world applications. We propose to fill the gap between HDDL and these operational needs and to extend HDDL by taking inspiration from PDDL 2.1 in order to express numerical and temporal expressions. This paper opens discussions on the semantics and the syntax needed for a future HDDL 2.1 extension.
* 5 pages, International Workshop of Hierarchical Planning (ICAPS), 2023
The Impacts of Human-Cobot Collaboration on Perceived Cognitive Load and Usability during an Industrial Task: An Exploratory Experiment
May 30, 2023Since cobots (collaborative robots) are increasingly being introduced in industrial environments, being aware of their potential positive and negative impacts on human collaborators is essential. This study guides occupational health workers by identifying the potential gains (reduced perceived time demand, number of gestures and number of errors) and concerns (the cobot takes a long time to perceive its environment, which eads to an increased completion time) associated with working with cobots. In our study, the collaboration between human and cobot during an assembly task did not negatively impact perceived cognitive load, increased completion time (but decreased perceived time demand), and decreased the number of gestures performed by participants and the number of errors made. Thus, performing the task in collaboration with a cobot improved the user's experience and performance, except for completion time, which increased. This study opens up avenues to investigate how to improve cobots to ensure the usability of the human-machine system at work.
* 12 pages
iRoPro: An interactive Robot Programming Framework
Dec 08, 2021
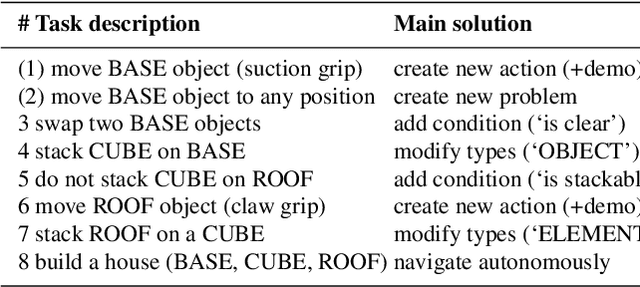
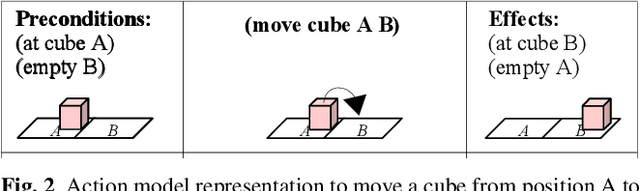
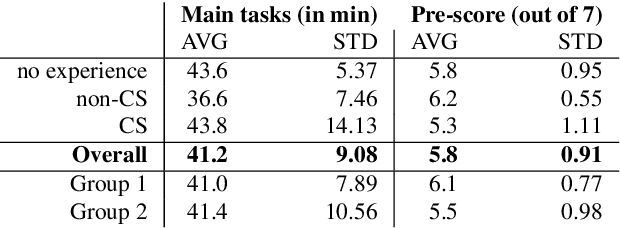
The great diversity of end-user tasks ranging from manufacturing environments to personal homes makes pre-programming robots for general purpose applications extremely challenging. In fact, teaching robots new actions from scratch that can be reused for previously unseen tasks remains a difficult challenge and is generally left up to robotics experts. In this work, we present iRoPro, an interactive Robot Programming framework that allows end-users with little to no technical background to teach a robot new reusable actions. We combine Programming by Demonstration and Automated Planning techniques to allow the user to construct the robot's knowledge base by teaching new actions by kinesthetic demonstration. The actions are generalised and reused with a task planner to solve previously unseen problems defined by the user. We implement iRoPro as an end-to-end system on a Baxter Research Robot to simultaneously teach low- and high-level actions by demonstration that the user can customise via a Graphical User Interface to adapt to their specific use case. To evaluate the feasibility of our approach, we first conducted pre-design experiments to better understand the user's adoption of involved concepts and the proposed robot programming process. We compare results with post-design experiments, where we conducted a user study to validate the usability of our approach with real end-users. Overall, we showed that users with different programming levels and educational backgrounds can easily learn and use iRoPro and its robot programming process.
* arXiv admin note: substantial text overlap with arXiv:2103.14342
TempAMLSI : Temporal Action Model Learning based on Grammar Induction
Dec 08, 2021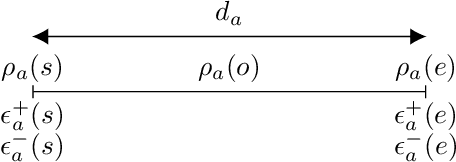
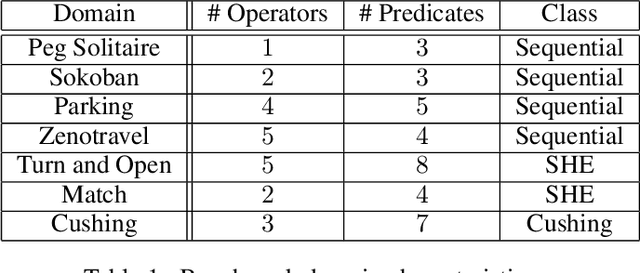
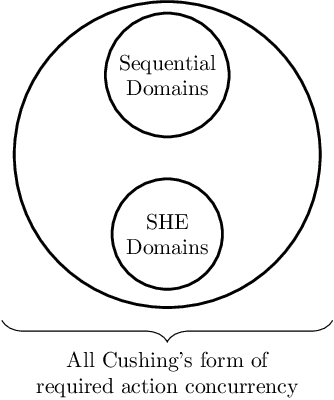
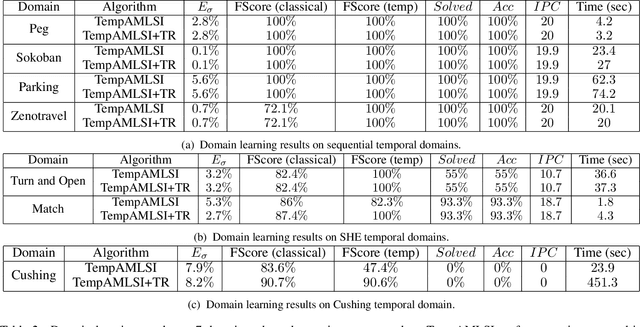
Hand-encoding PDDL domains is generally accepted as difficult, tedious and error-prone. The difficulty is even greater when temporal domains have to be encoded. Indeed, actions have a duration and their effects are not instantaneous. In this paper, we present TempAMLSI, an algorithm based on the AMLSI approach able to learn temporal domains. TempAMLSI is based on the classical assumption done in temporal planning that it is possible to convert a non-temporal domain into a temporal domain. TempAMLSI is the first approach able to learn temporal domain with single hard envelope and Cushing's intervals. We show experimentally that TempAMLSI is able to learn accurate temporal domains, i.e., temporal domain that can be used directly to solve new planning problem, with different forms of action concurrency.
End-User Programming of Low- and High-Level Actions for Robotic Task Planning
Mar 26, 2021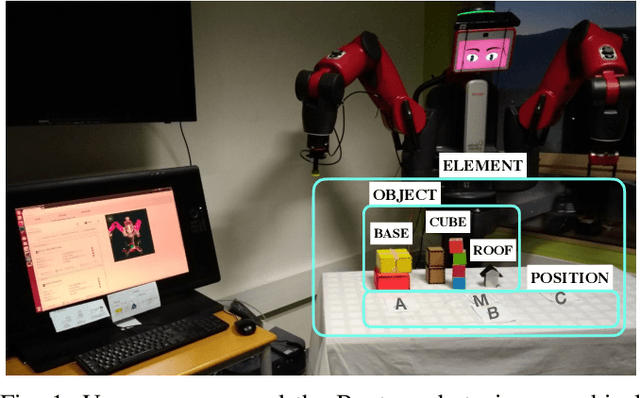
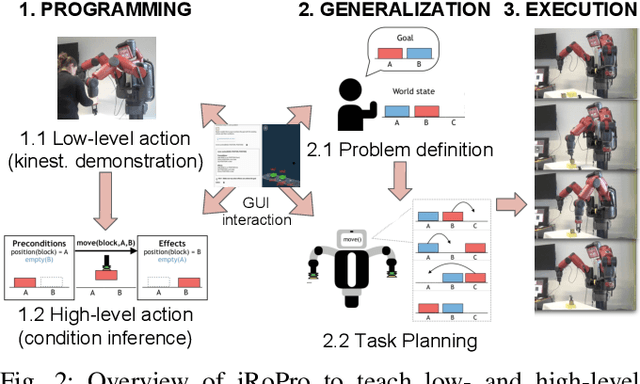
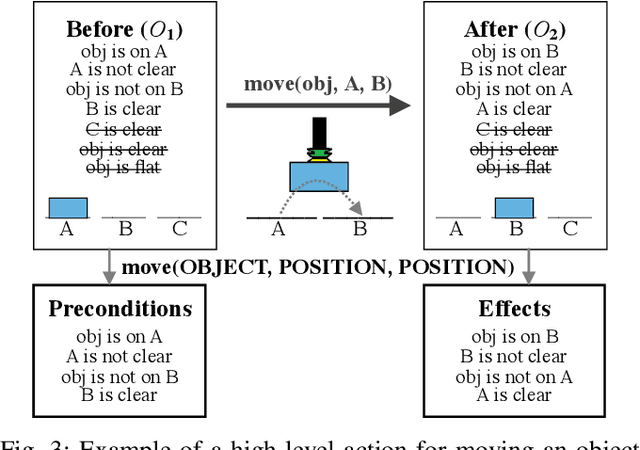
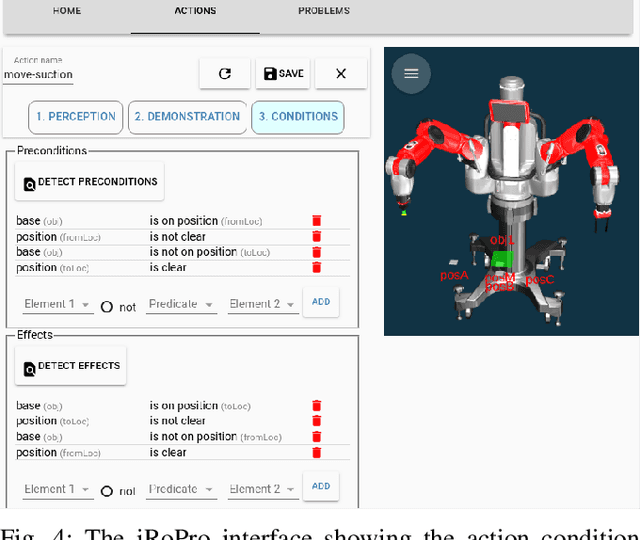
Programming robots for general purpose applications is extremely challenging due to the great diversity of end-user tasks ranging from manufacturing environments to personal homes. Recent work has focused on enabling end-users to program robots using Programming by Demonstration. However, teaching robots new actions from scratch that can be reused for unseen tasks remains a difficult challenge and is generally left up to robotic experts. We propose iRoPro, an interactive Robot Programming framework that allows end-users to teach robots new actions from scratch and reuse them with a task planner. In this work we provide a system implementation on a two-armed Baxter robot that (i) allows simultaneous teaching of low- and high-level actions by demonstration, (ii) includes a user interface for action creation with condition inference and modification, and (iii) allows creating and solving previously unseen problems using a task planner for the robot to execute in real-time. We evaluate the generalisation power of the system on six benchmark tasks and show how taught actions can be easily reused for complex tasks. We further demonstrate its usability with a user study (N=21), where users completed eight tasks to teach the robot new actions that are reused with a task planner. The study demonstrates that users with any programming level and educational background can easily learn and use the system.
* 8 pages, 6 figures, 2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN)