 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-User Programming of Low- and High-Level Actions for Robotic Task Planning
Paper and Code
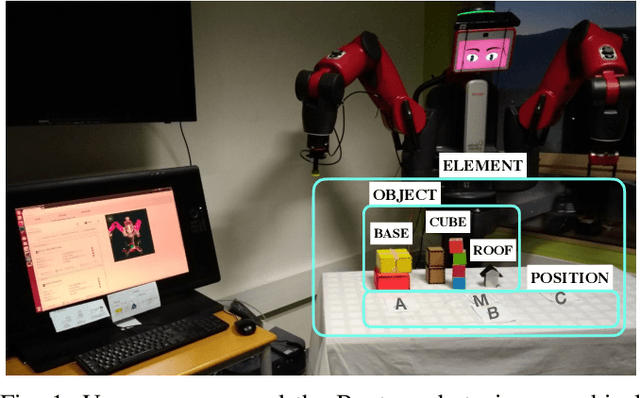
Programming robots for general purpose applications is extremely challenging due to the great diversity of end-user tasks ranging from manufacturing environments to personal homes. Recent work has focused on enabling end-users to program robots using Programming by Demonstration. However, teaching robots new actions from scratch that can be reused for unseen tasks remains a difficult challenge and is generally left up to robotic experts. We propose iRoPro, an interactive Robot Programming framework that allows end-users to teach robots new actions from scratch and reuse them with a task planner. In this work we provide a system implementation on a two-armed Baxter robot that (i) allows simultaneous teaching of low- and high-level actions by demonstration, (ii) includes a user interface for action creation with condition inference and modification, and (iii) allows creating and solving previously unseen problems using a task planner for the robot to execute in real-time. We evaluate the generalisation power of the system on six benchmark tasks and show how taught actions can be easily reused for complex tasks. We further demonstrate its usability with a user study (N=21), where users completed eight tasks to teach the robot new actions that are reused with a task planner. The study demonstrates that users with any programming level and educational background can easily learn and use the system.