 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Generation of Phantom Limbs Using Visible Hierarchical Autoencoders
Oct 02, 2019

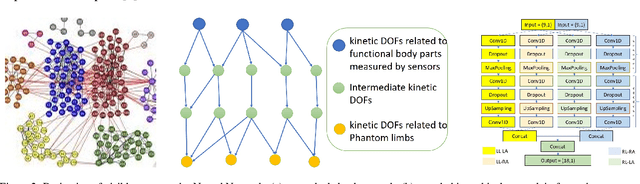
This paper proposed a hierarchical visible autoencoder in the adaptive phantom limbs generation according to the kinetic behavior of functional body-parts, which are measured by heterogeneous kinetic sensors. The proposed visible hierarchical autoencoder consists of interpretable and multi-correlated autoencoder pipelines, which is directly derived from the hierarchical network described in forest data-structure. According to specified kinetic script (e.g., dancing, running, etc.) and users' physical conditions, hierarchical network is extracted from human musculoskeletal network, which is fabricated by multiple body components (e.g., muscle, bone, and joints, etc.) that are bio-mechanically, functionally, or nervously correlated with each other and exhibit mostly non-divergent kinetic behaviors. Multi-layer perceptron (MLP) regressor models, as well as several variations of autoencoder models, are investigated for the sequential generation of missing or dysfunctional limbs. The resulting kinematic behavior of phantom limbs will be constructed using virtual reality and augmented reality (VR/AR), actuators, and potentially controller for a prosthesis (an artificial device that replaces a missing body part). The addressed work aims to develop practical innovative exercise methods that (1) engage individuals at all ages, including those with a chronic health condition(s) and/or disability, in regular physical activities, (2) accelerate the rehabilitation of patients, and (3) release users' phantom limb pain. The physiological and psychological impact of the addressed work will critically be assessed in future work.
A Self-Training Method for Semi-Supervised GANs
Oct 27, 2017
Since the creation of Generative Adversarial Networks (GANs), much work has been done to improve their training stability, their generated image quality, their range of application but nearly none of them explored their self-training potential. Self-training has been used before the advent of deep learning in order to allow training on limited labelled training data and has shown impressive results in semi-supervised learning. In this work, we combine these two ideas and make GANs self-trainable for semi-supervised learning tasks by exploiting their infinite data generation potential. Results show that using even the simplest form of self-training yields an improvement. We also show results for a more complex self-training scheme that performs at least as well as the basic self-training scheme but with significantly less data augmentation.
Modelling Data Dispersion Degree in Automatic Robust Estimation for Multivariate Gaussian Mixture Models with an Application to Noisy Speech Processing
May 19, 2014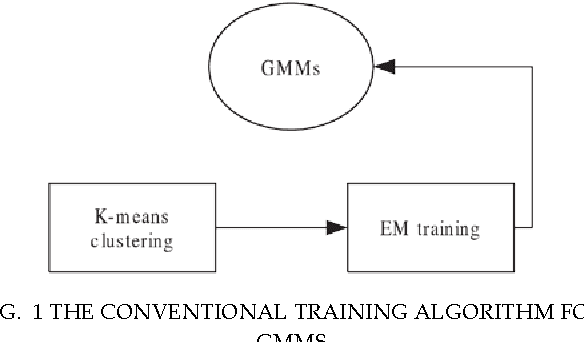

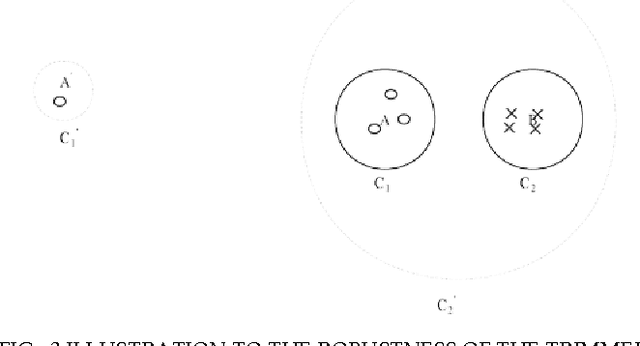

The trimming scheme with a prefixed cutoff portion is known as a method of improving the robustness of statistical models such as multivariate Gaussian mixture models (MG- MMs) in small scale tests by alleviating the impacts of outliers. However, when this method is applied to real- world data, such as noisy speech processing, it is hard to know the optimal cut-off portion to remove the outliers and sometimes removes useful data samples as well. In this paper, we propose a new method based on measuring the dispersion degree (DD) of the training data to avoid this problem, so as to realise automatic robust estimation for MGMMs. The DD model is studied by using two different measures. For each one, we theoretically prove that the DD of the data samples in a context of MGMMs approximately obeys a specific (chi or chi-square) distribution. The proposed method is evaluated on a real-world application with a moderately-sized speaker recognition task. Experiments show that the proposed method can significantly improve the robustness of the conventional training method of GMMs for speaker recognition.