 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Inertial Pose: A deep learning approach for human pose estimation
Jun 07, 2025Inertial-based Motion capture system has been attracting growing attention due to its wearability and unsconstrained use. However, accurate human joint estimation demands several complex and expertise demanding steps, which leads to expensive software such as the state-of-the-art MVN Awinda from Xsens Technologies. This work aims to study the use of Neural Networks to abstract the complex biomechanical models and analytical mathematics required for pose estimation. Thus, it presents a comparison of different Neural Network architectures and methodologies to understand how accurately these methods can estimate human pose, using both low cost(MPU9250) and high end (Mtw Awinda) Magnetic, Angular Rate, and Gravity (MARG) sensors. The most efficient method was the Hybrid LSTM-Madgwick detached, which achieved an Quaternion Angle distance error of 7.96, using Mtw Awinda data. Also, an ablation study was conducted to study the impact of data augmentation, output representation, window size, loss function and magnetometer data on the pose estimation error. This work indicates that Neural Networks can be trained to estimate human pose, with results comparable to the state-of-the-art fusion filters.
A Human-Sensitive Controller: Adapting to Human Ergonomics and Physical Constraints via Reinforcement Learning
Apr 14, 2025Work-Related Musculoskeletal Disorders continue to be a major challenge in industrial environments, leading to reduced workforce participation, increased healthcare costs, and long-term disability. This study introduces a human-sensitive robotic system aimed at reintegrating individuals with a history of musculoskeletal disorders into standard job roles, while simultaneously optimizing ergonomic conditions for the broader workforce. This research leverages reinforcement learning to develop a human-aware control strategy for collaborative robots, focusing on optimizing ergonomic conditions and preventing pain during task execution. Two RL approaches, Q-Learning and Deep Q-Network (DQN), were implemented and tested to personalize control strategies based on individual user characteristics. Although experimental results revealed a simulation-to-real gap, a fine-tuning phase successfully adapted the policies to real-world conditions. DQN outperformed Q-Learning by completing tasks faster while maintaining zero pain risk and safe ergonomic levels. The structured testing protocol confirmed the system's adaptability to diverse human anthropometries, underscoring the potential of RL-driven cobots to enable safer, more inclusive workplaces.
Deep learning-based approaches for human motion decoding in smart walkers for rehabilitation
Jan 13, 2023



Gait disabilities are among the most frequent worldwide. Their treatment relies on rehabilitation therapies, in which smart walkers are being introduced to empower the user's recovery and autonomy, while reducing the clinicians effort. For that, these should be able to decode human motion and needs, as early as possible. Current walkers decode motion intention using information of wearable or embedded sensors, namely inertial units, force and hall sensors, and lasers, whose main limitations imply an expensive solution or hinder the perception of human movement. Smart walkers commonly lack a seamless human-robot interaction, which intuitively understands human motions. A contactless approach is proposed in this work, addressing human motion decoding as an early action recognition/detection problematic, using RGB-D cameras. We studied different deep learning-based algorithms, organised in three different approaches, to process lower body RGB-D video sequences, recorded from an embedded camera of a smart walker, and classify them into 4 classes (stop, walk, turn right/left). A custom dataset involving 15 healthy participants walking with the device was acquired and prepared, resulting in 28800 balanced RGB-D frames, to train and evaluate the deep networks. The best results were attained by a convolutional neural network with a channel attention mechanism, reaching accuracy values of 99.61% and above 93%, for offline early detection/recognition and trial simulations, respectively. Following the hypothesis that human lower body features encode prominent information, fostering a more robust prediction towards real-time applications, the algorithm focus was also evaluated using Dice metric, leading to values slightly higher than 30%. Promising results were attained for early action detection as a human motion decoding strategy, with enhancements in the focus of the proposed architectures.
Real-Time Human Pose Estimation on a Smart Walker using Convolutional Neural Networks
Jun 28, 2021

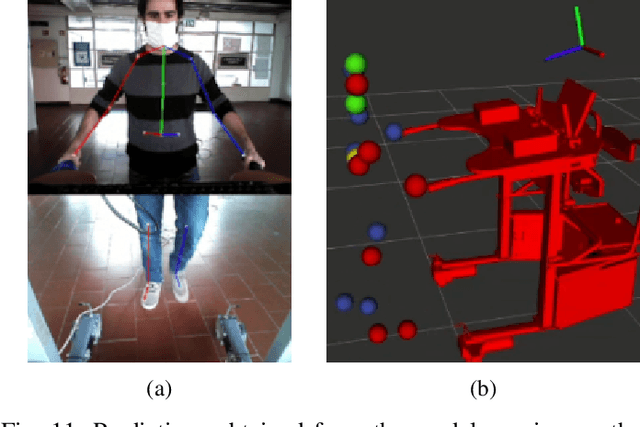
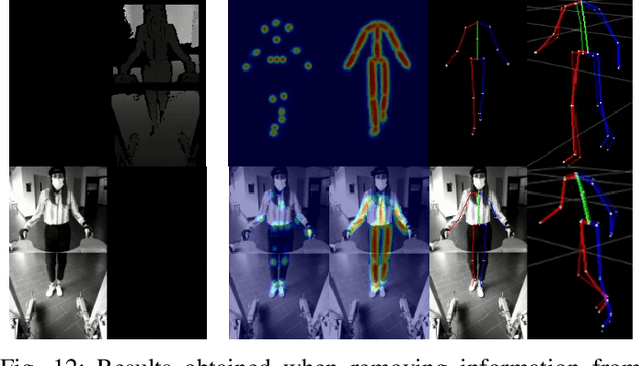
Rehabilitation is important to improve quality of life for mobility-impaired patients. Smart walkers are a commonly used solution that should embed automatic and objective tools for data-driven human-in-the-loop control and monitoring. However, present solutions focus on extracting few specific metrics from dedicated sensors with no unified full-body approach. We investigate a general, real-time, full-body pose estimation framework based on two RGB+D camera streams with non-overlapping views mounted on a smart walker equipment used in rehabilitation. Human keypoint estimation is performed using a two-stage neural network framework. The 2D-Stage implements a detection module that locates body keypoints in the 2D image frames. The 3D-Stage implements a regression module that lifts and relates the detected keypoints in both cameras to the 3D space relative to the walker. Model predictions are low-pass filtered to improve temporal consistency. A custom acquisition method was used to obtain a dataset, with 14 healthy subjects, used for training and evaluating the proposed framework offline, which was then deployed on the real walker equipment. An overall keypoint detection error of 3.73 pixels for the 2D-Stage and 44.05mm for the 3D-Stage were reported, with an inference time of 26.6ms when deployed on the constrained hardware of the walker. We present a novel approach to patient monitoring and data-driven human-in-the-loop control in the context of smart walkers. It is able to extract a complete and compact body representation in real-time and from inexpensive sensors, serving as a common base for downstream metrics extraction solutions, and Human-Robot interaction applications. Despite promising results, more data should be collected on users with impairments, to assess its performance as a rehabilitation tool in real-world scenarios.