 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Temporal Analysis for Non-Acted Body Affect Recognition
Jul 23, 2019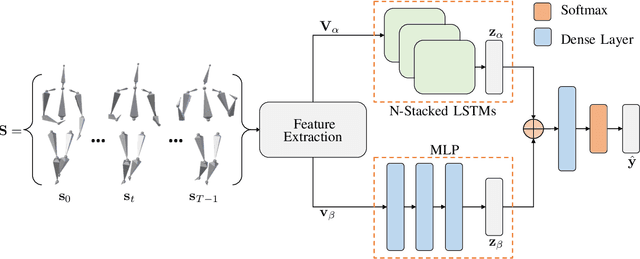
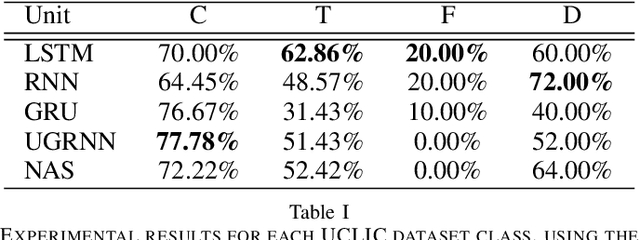
Affective computing is a field of great interest in many computer vision applications, including video surveillance, behaviour analysis, and human-robot interaction. Most of the existing literature has addressed this field by analysing different sets of face features. However, in the last decade, several studies have shown how body movements can play a key role even in emotion recognition. The majority of these experiments on the body are performed by trained actors whose aim is to simulate emotional reactions. These unnatural expressions differ from the more challenging genuine emotions, thus invalidating the obtained results. In this paper, a solution for basic non-acted emotion recognition based on 3D skeleton and Deep Neural Networks (DNNs) is provided. The proposed work introduces three majors contributions. First, unlike the current state-of-the-art in non-acted body affect recognition, where only static or global body features are considered, in this work also temporal local movements performed by subjects in each frame are examined. Second, an original set of global and time-dependent features for body movement description is provided. Third, to the best of out knowledge, this is the first attempt to use deep learning methods for non-acted body affect recognition. Due to the novelty of the topic, only the UCLIC dataset is currently considered the benchmark for comparative tests. On the latter, the proposed method outperforms all the competitors.
Exploiting Recurrent Neural Networks and Leap Motion Controller for Sign Language and Semaphoric Gesture Recognition
Mar 28, 2018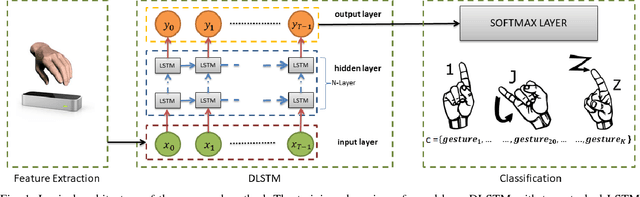
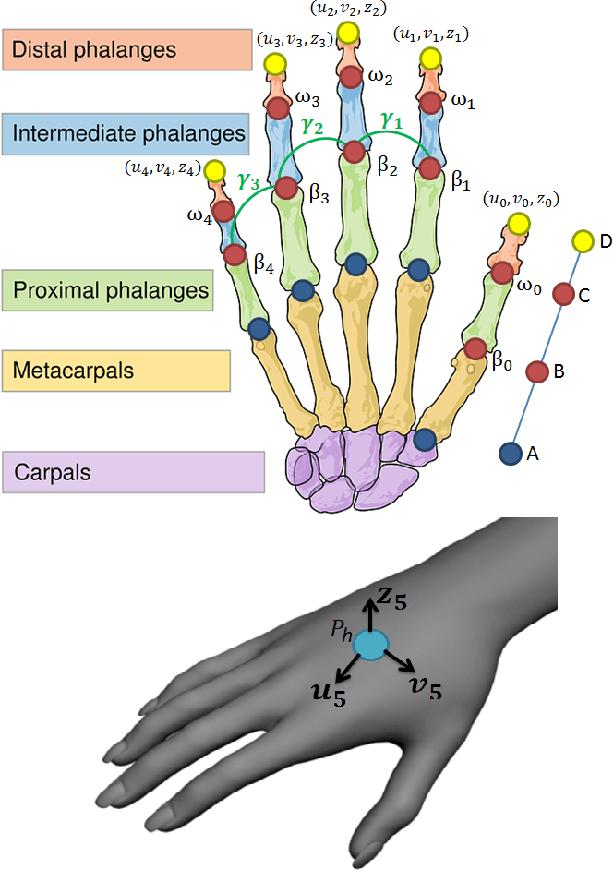
In human interactions, hands are a powerful way of expressing information that, in some cases, can be used as a valid substitute for voice, as it happens in Sign Language. Hand gesture recognition has always been an interesting topic in the areas of computer vision and multimedia. These gestures can be represented as sets of feature vectors that change over time. Recurrent Neural Networks (RNNs) are suited to analyse this type of sets thanks to their ability to model the long term contextual information of temporal sequences. In this paper, a RNN is trained by using as features the angles formed by the finger bones of human hands. The selected features, acquired by a Leap Motion Controller (LMC) sensor, have been chosen because the majority of human gestures produce joint movements that generate truly characteristic corners. A challenging subset composed by a large number of gestures defined by the American Sign Language (ASL) is used to test the proposed solution and the effectiveness of the selected angles. Moreover, the proposed method has been compared to other state of the art works on the SHREC dataset, thus demonstrating its superiority in hand gesture recognition accuracy.