 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning Models for Global Coordinate Transformations that Linearize PDEs
Nov 07, 2019
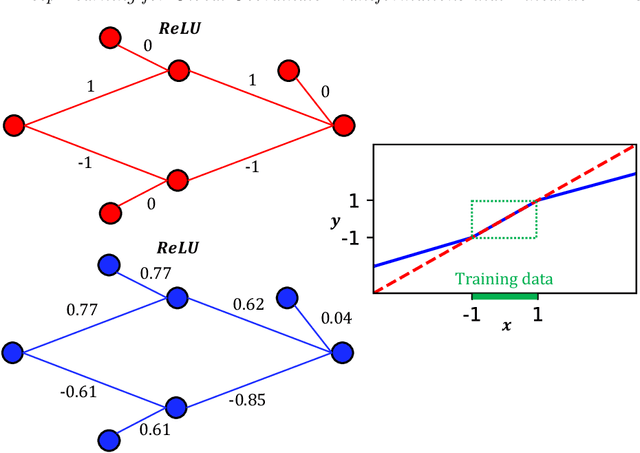
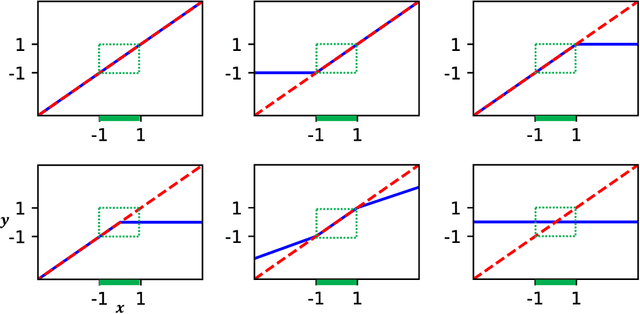
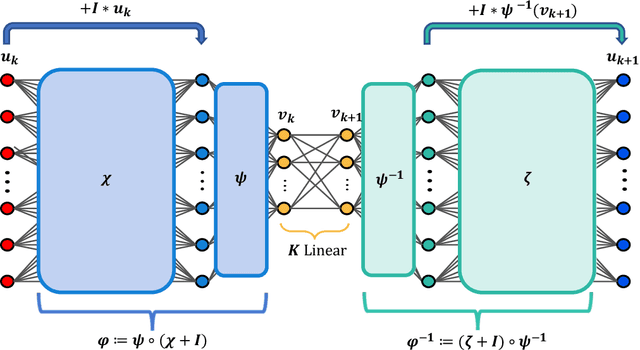
We develop a deep autoencoder architecture that can be used to find a coordinate transformation which turns a nonlinear PDE into a linear PDE. Our architecture is motivated by the linearizing transformations provided by the Cole-Hopf transform for Burgers equation and the inverse scattering transform for completely integrable PDEs. By leveraging a residual network architecture, a near-identity transformation can be exploited to encode intrinsic coordinates in which the dynamics are linear. The resulting dynamics are given by a Koopman operator matrix $\mathbf{K}$. The decoder allows us to transform back to the original coordinates as well. Multiple time step prediction can be performed by repeated multiplication by the matrix $\mathbf{K}$ in the intrinsic coordinates. We demonstrate our method on a number of examples, including the heat equation and Burgers equation, as well as the substantially more challenging Kuramoto-Sivashinsky equation, showing that our method provides a robust architecture for discovering interpretable, linearizing transforms for nonlinear PDEs.