 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTool Shape Optimization through Backpropagation of Neural Network
Jul 16, 2024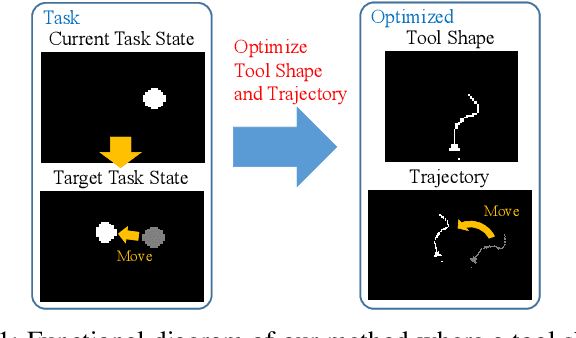
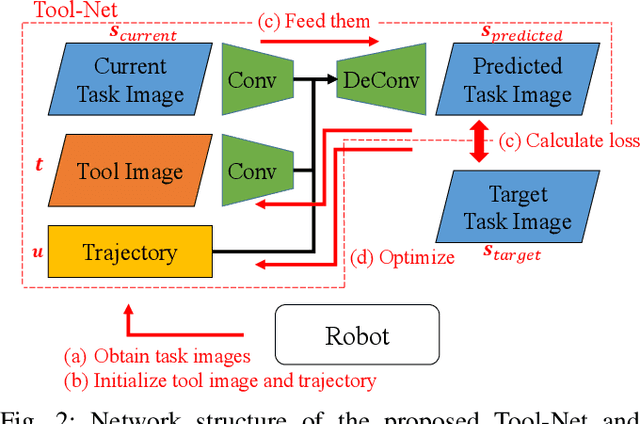
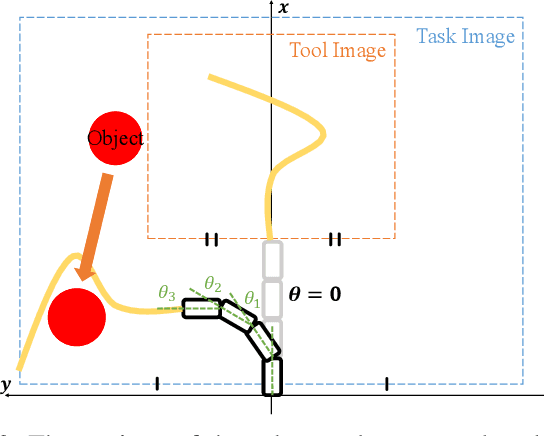

When executing a certain task, human beings can choose or make an appropriate tool to achieve the task. This research especially addresses the optimization of tool shape for robotic tool-use. We propose a method in which a robot obtains an optimized tool shape, tool trajectory, or both, depending on a given task. The feature of our method is that a transition of the task state when the robot moves a certain tool along a certain trajectory is represented by a deep neural network. We applied this method to object manipulation tasks on a 2D plane, and verified that appropriate tool shapes are generated by using this novel method.
Dynamic Task Control Method of a Flexible Manipulator Using a Deep Recurrent Neural Network
Jul 16, 2024



The flexible body has advantages over the rigid body in terms of environmental contact thanks to its underactuation. On the other hand, when applying conventional control methods to realize dynamic tasks with the flexible body, there are two difficulties: accurate modeling of the flexible body and the derivation of intermediate postures to achieve the tasks. Learning-based methods are considered to be more effective than accurate modeling, but they require explicit intermediate postures. To solve these two difficulties at the same time, we developed a real-time task control method with a deep recurrent neural network named Dynamic Task Execution Network (DTXNET), which acquires the relationship among the control command, robot state including image information, and task state. Once the network is trained, only the target event and its timing are needed to realize a given task. To demonstrate the effectiveness of our method, we applied it to the task of Wadaiko (traditional Japanese drum) drumming as an example, and verified the best configuration of DTXNET.
Dynamic Manipulation of Flexible Objects with Torque Sequence Using a Deep Neural Network
Jan 29, 2019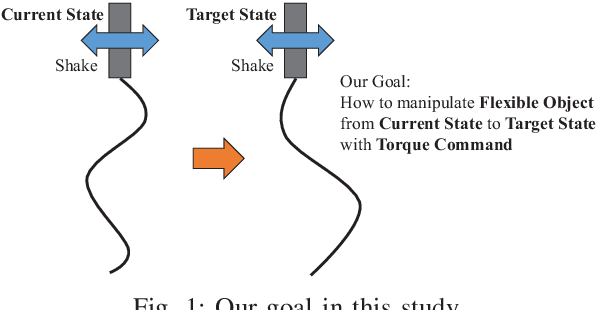
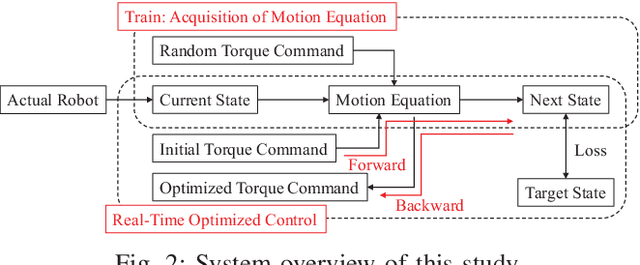
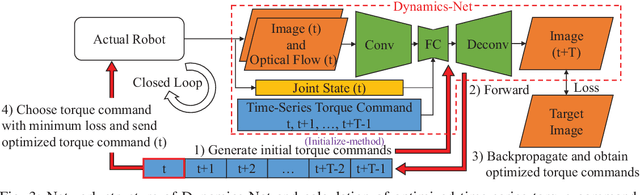
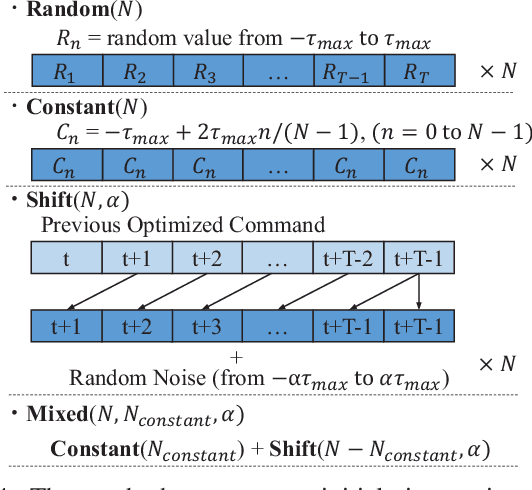
For dynamic manipulation of flexible objects, we propose an acquisition method of a flexible object motion equation model using a deep neural network and a control method to realize a target state by calculating an optimized time-series joint torque command. By using the proposed method, any physics model of a target object is not needed, and the object can be controlled as intended. We applied this method to manipulations of a rigid object, a flexible object with and without environmental contact, and a cloth, and verified its effectiveness.